



Remotely Operated Vehicles (ROVs) and Autonomous Underwater Vehicles (AUVs) are the most widely used types of underwater robots. Most of these systems rely on continuously rotating propellers, or thrusters, for propulsion. While propellers provide highly efficient locomotion, they are vulnerable to entanglement in debris, algae, and aquatic vegetation commonly found in natural underwater environments. In such situations, propulsion based solely on reciprocating joint motion can be more robust and reliable than continuously rotating mechanisms. Our laboratory therefore studies underwater snake robots that achieve swimming using only oscillatory joint motions.
Conventional underwater robots are typically designed by enclosing motors, electronic circuits, and other components inside waterproof housings sealed with rubber gaskets. Although this approach prevents water ingress, seals placed around moving joints introduce significant friction, resulting in energy losses and making precise low-force control more difficult.
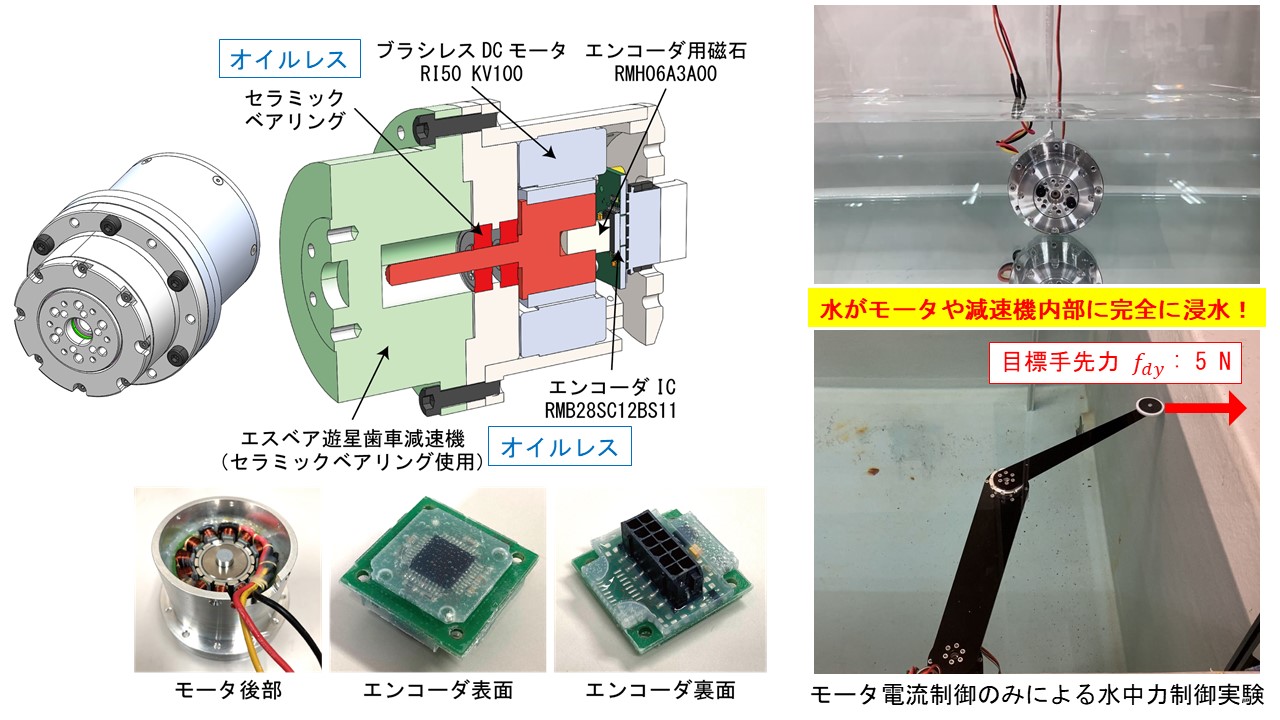
To overcome these limitations, we employ submersible geared servo motors that operate without waterproof seals at the joints. In our design, water is intentionally allowed to enter the motor and gearbox, enabling us to investigate how fully flooded actuators influence underwater force control performance.
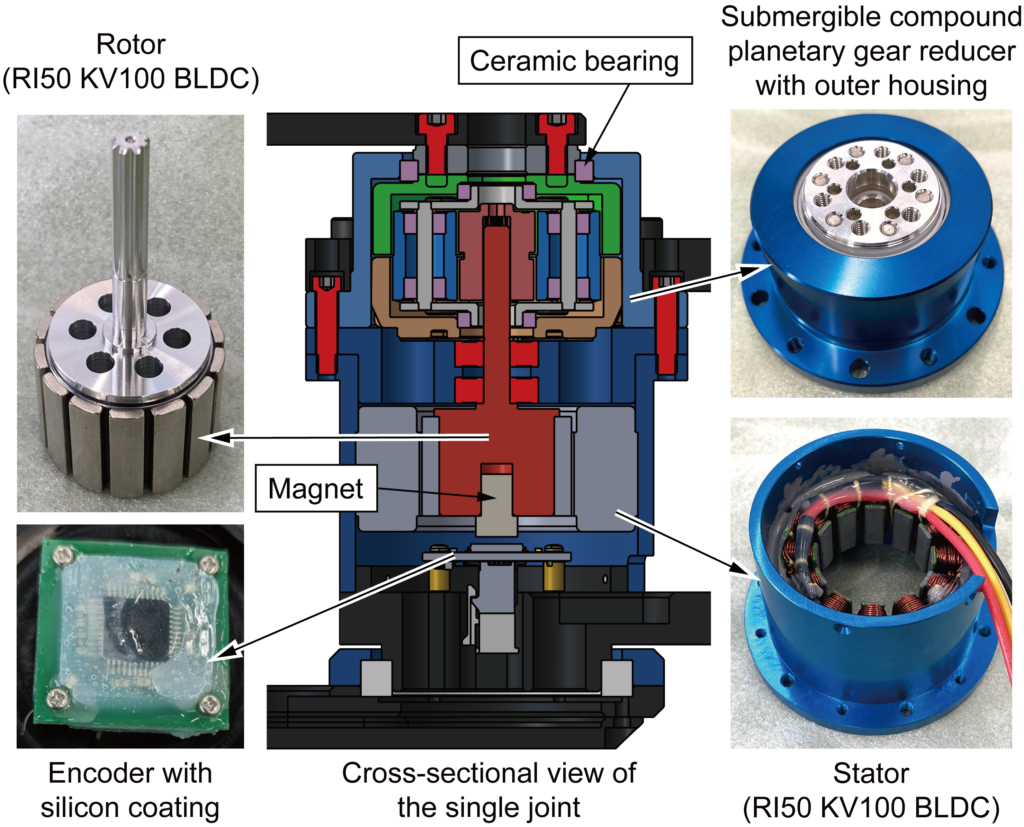
For conventional DC motors, output torque is approximately proportional to the motor current. By eliminating waterproof seals, friction losses are greatly reduced, allowing joint torque to be controlled more accurately using motor current alone. Taking advantage of this characteristic, we aim to develop underwater snake robots capable of interacting physically with their surroundings—for example, by wrapping around underwater structures or navigating through narrow spaces while actively regulating contact forces with the environment.
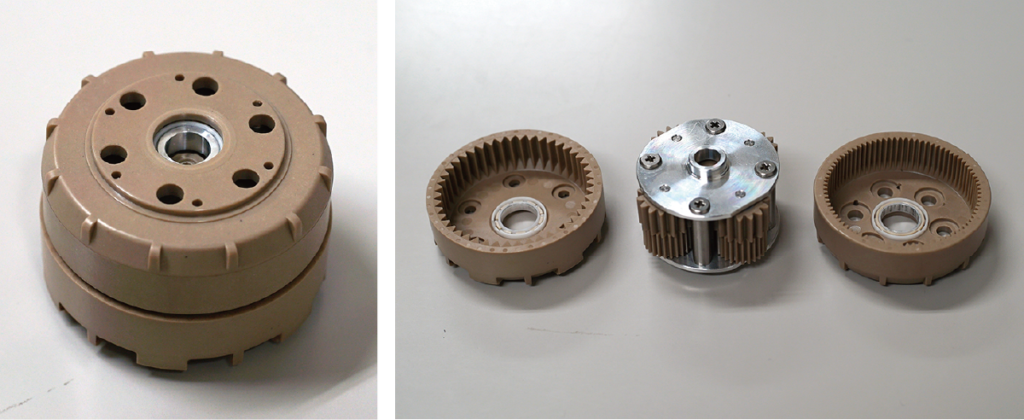
The actuators employ corrosion-resistant brushless DC motors combined with S-BEAR DD, a resin gearbox manufactured by Starlite Co., Ltd. Because the gearbox operates without lubricating oil and offers excellent wear resistance and heat resistance, it is well suited for underwater applications. In addition, all bearings are made of ceramic to improve corrosion resistance and durability.
This research was supported by JSPS KAKENHI (Grant-in-Aid for Scientific Research (B), Grant No. 22H01456), "Fundamental Research on Torque-Sensorless and Seal-Less Flexible Actuators for Amphibious Robots." The gearbox used in this study is the S-BEAR DD4830 manufactured by Starlite Co., Ltd.
Related Component Technologies
Related Publications
- Atsushi Kakogawa, Shah Darshankumar Rajendrakumar, and Yuto Iwasaki, “Grasping of Cylindrical Structures Using an Underwater Snake Robot without Force/Torque Sensors and Actuator Waterproofing,” Journal of Robotics and Mechatronics, Vol. 36, No. 6, pp. 1458–1467, 2024.
- Shah Darshankumar Rajendrakumar, Atsushi Kakogawa, and Shugen Ma, “An Underwater Snake Robot that Does Not Consider Actuator Waterproofing: Design and Preliminary Experiments,” Proceedings of the 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO 2023), pp. 226–231, 2023.
- Yuto Iwasaki and Atsushi Kakogawa, “Force/Torque Sensorless Grasping of Cylindrical Structures Using an Underwater Snake Robot,” Proceedings of the 2025 JSME Conference on Robotics and Mechatronics, 2025. [in Japanese]
- Lang Wang, Atsushi Kakogawa, Zaiyang Liu, and Yuto Iwasaki, “Effects of Tail Fin Stiffness and Length on the Swimming Efficiency of an Underwater Snake Robot,” Proceedings of the 43rd Annual Conference of the Robotics Society of Japan, 2025. [in Japanese]