



The 2025 IEEE International Conference on Real-time Computing and Robotics (IEEE RCAR 2025) was held at the Toyama International Conference Center from June 1–6 . Three students—D2 Zhongkai Sun, M2 Yuta Shimizu, and M2 Ryota Taniguchi—delivered presentations on their latest research. Professor Zhongkui Wang of Ritsumeikan University served as the General Chair.


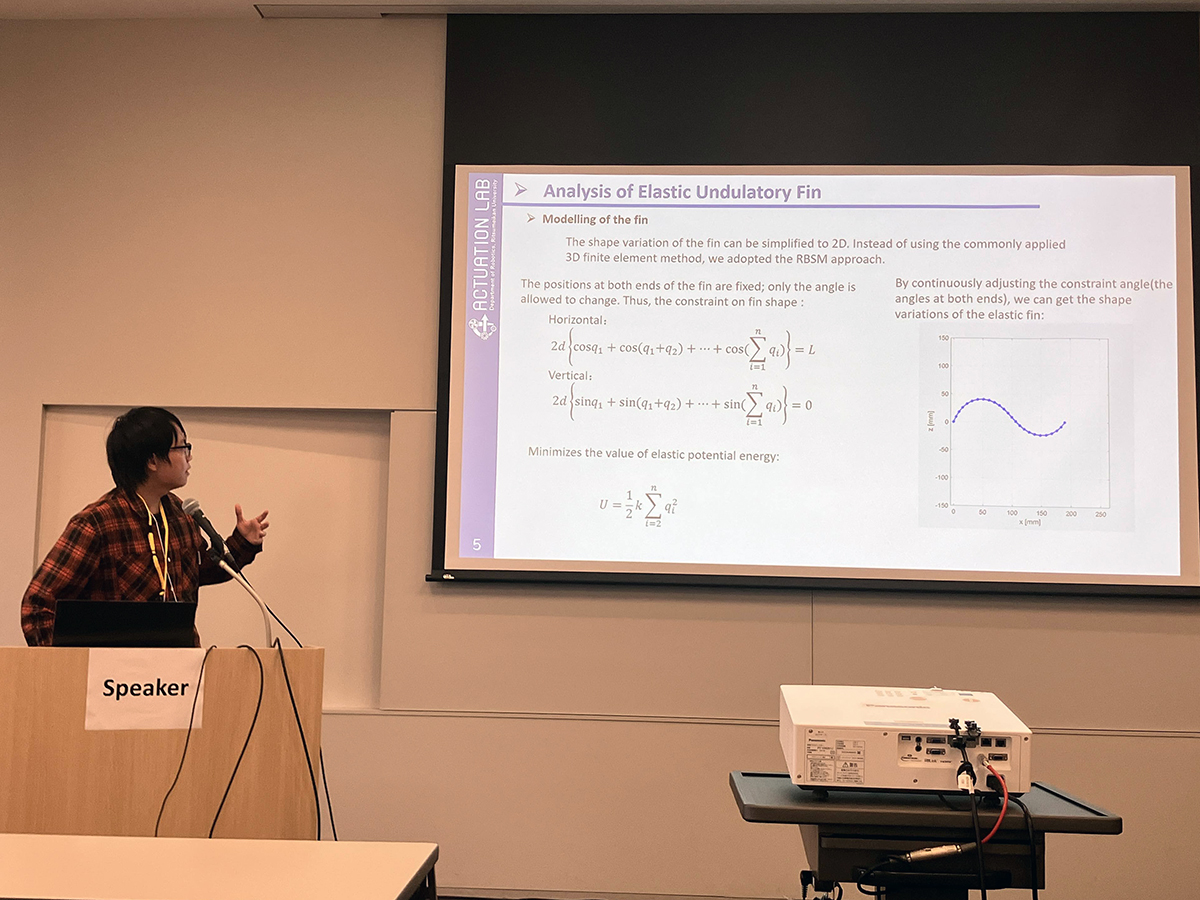
- Zhongkai Sun, Atsushi Kakogawa, Shugen Ma, Zhongkui Wang, Guoteng Zhang, Yang Tian, and Longchuan Li, Bio-Inspired Continuous Elastic Undulatory Fin for Underwater Robots Propulsion, The 2024 IEEE International Conference on Real-time Computing and Robotics (RCAR 2025), pp. 228-233, 2025
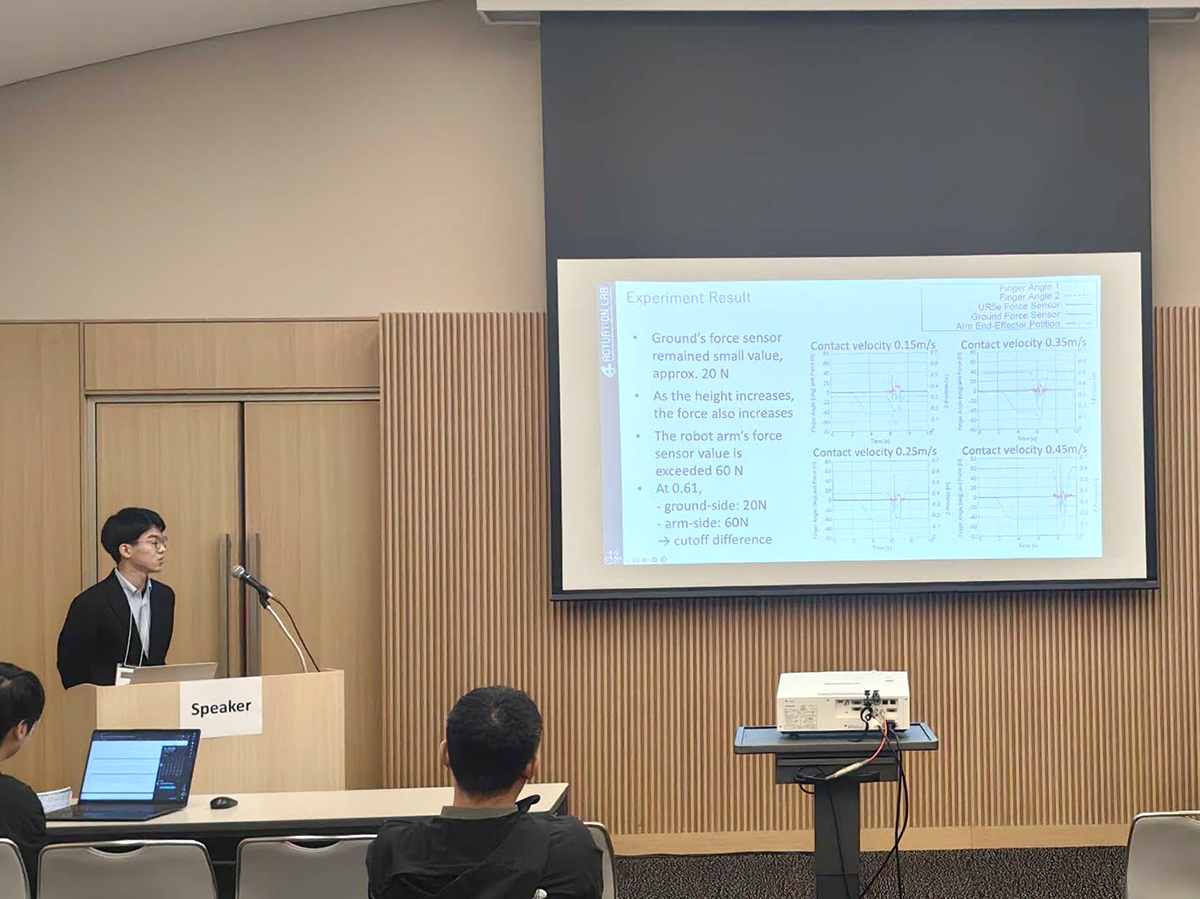
- Yuta Shimizu, Atsushi Kakogawa, and Sadao Kawamura, A Two-Fingered Independent Gripper Capable of High-Speed Contact Grasping Using Low-Friction Geared Electric Motors, The 2024 IEEE International Conference on Real-time Computing and Robotics (RCAR 2025), pp. 305-315, 2025
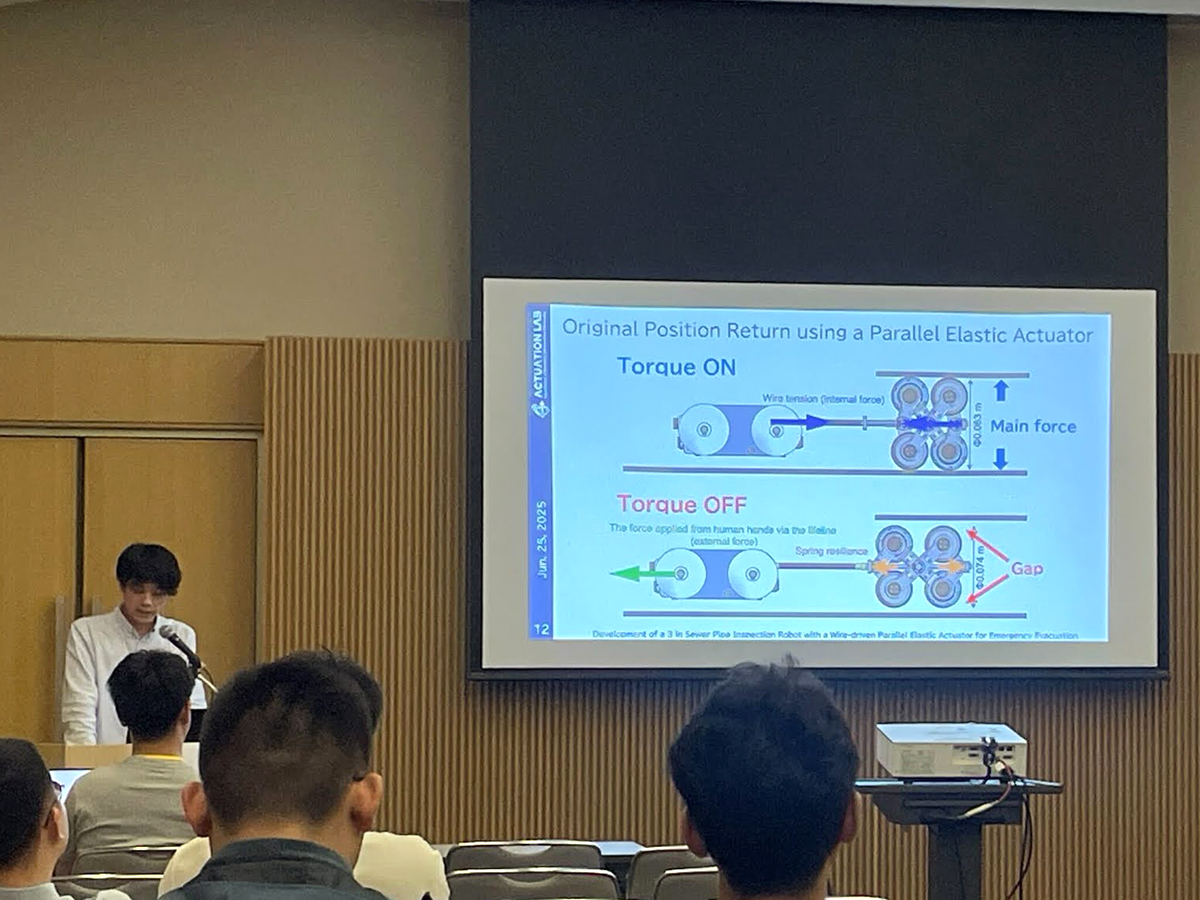
- Atsushi Kakogawa, Ryota Taniguchi, and Tomonari Yamamoto, Development of a 3 in Sewer Pipe Inspection Robot with a Wire-driven Parallel Elastic Actuator for Emergency Evacuation, The 2024 IEEE International Conference on Real-time Computing and Robotics (RCAR 2025), pp. 691-696, 2025The 2025 IEEE International Conference on Real-time Computing and Robotics (IEEE RCAR 2025) will take place from June 1 to 6, 2025 in Toyama, Japan. The objective of this conference is to provide a forum for researchers in robotics and real-time computing to share the latest results and explore the opportunity of research collaboration. With wide applications of robots in industry and services sectors, real-time computing plays one of the major roles in various topics in robotics including real-time control, human-robot interactions, sensor perception and fusion, robot intelligence, etc. The scope of RCAR 2025 covers research, development and applications in the dynamic and exciting areas of real-time computing and robotics.