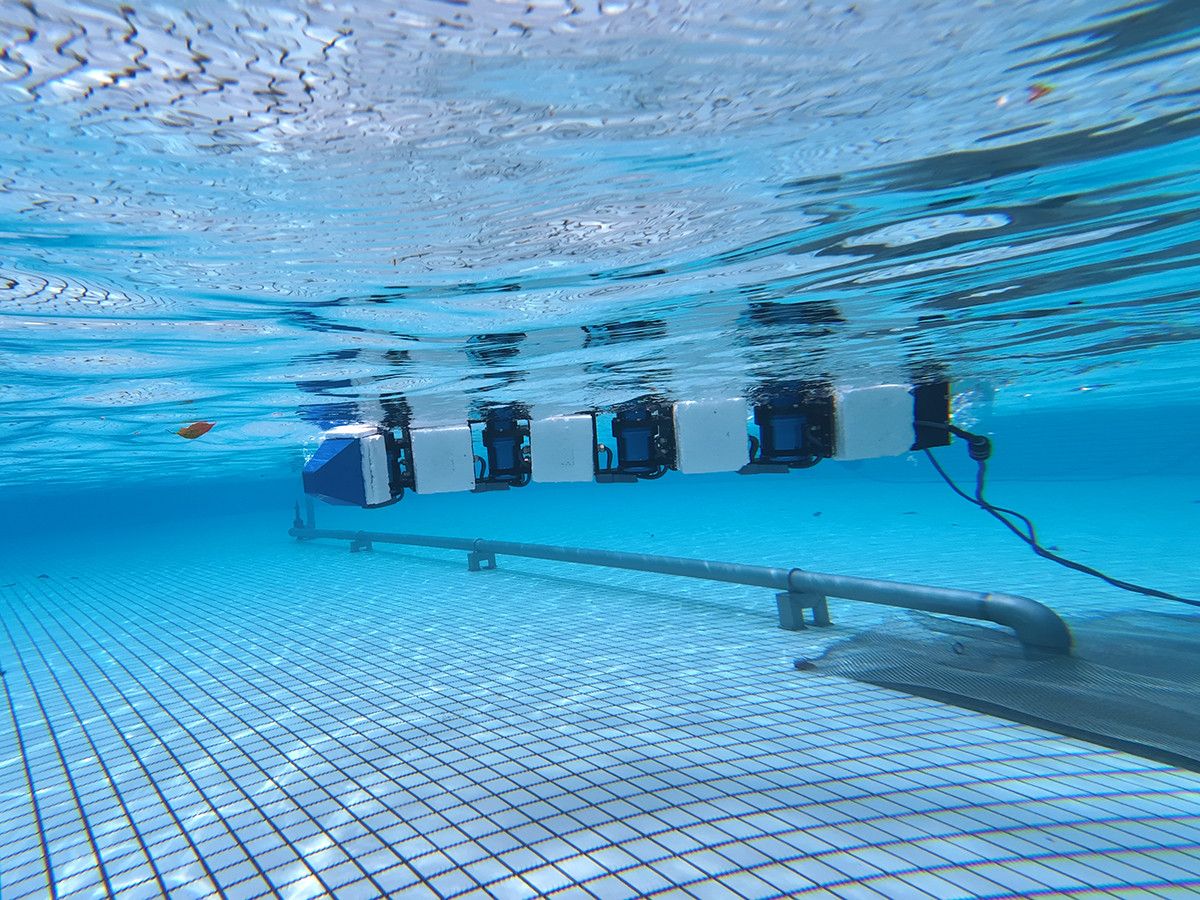
An article featuring our lab’s underwater snake robot was published in Nikkan Kogyo Shimbun. The robot uses submersible geared electric servo motors that operate without waterproof seals. Unlike traditional thruster-based or tracked ROVs which are susceptible to entanglement in weedy or debris-filled waters, our robot employs fin-based propulsion to navigate through complex underwater environments. While fin propulsion is typically used in fish-type robots, our research focuses on a multi-jointed (snake-like) design that enables not only swimming but also manipulation and handling using the robot’s flexible body. To reduce reliance on expensive underwater force or torque sensors we developed a sensorless torque control system using submersible motors. In a recent demonstration, the robot successfully grasped and collected floating objects using this sensorless control method.