



水中ロボットの分野では,Remotely Operated Vehicles (ROV)やAutonomous Underwater Vehicles (AUV)と呼ばれるものが一般的によく知られています.これらの多くの場合,移動には無限回転するプロペラ(スラスタ)を利用します.しかし,プロペラは移動効率が良い反面,ゴミが散在する水中環境や藻や水草が生えている環境では,それらを巻き込んでしまって故障を招く恐れがあります.このような環境では,無限回転式の推進機構よりも往復運動のみを使った移動方式の方が有用であることがあります.そこで本研究では,関節の往復運動のみを使った水中遊泳のためのヘビ型ロボット(蛇行遊泳ロボット)の研究を行っています.
一般的に水中ロボットを実現するためには,モータや回路基板などを全て防水容器の中に収め,さらに隙間をゴムシールで埋めてロボット内部に水が入らないように設計します.しかし,関節のような相対運動しなければならないような部分ではこのゴムシールが擦れて大きなエネルギーロスとなるだけでなく,微弱な力の制御が難しくなります.
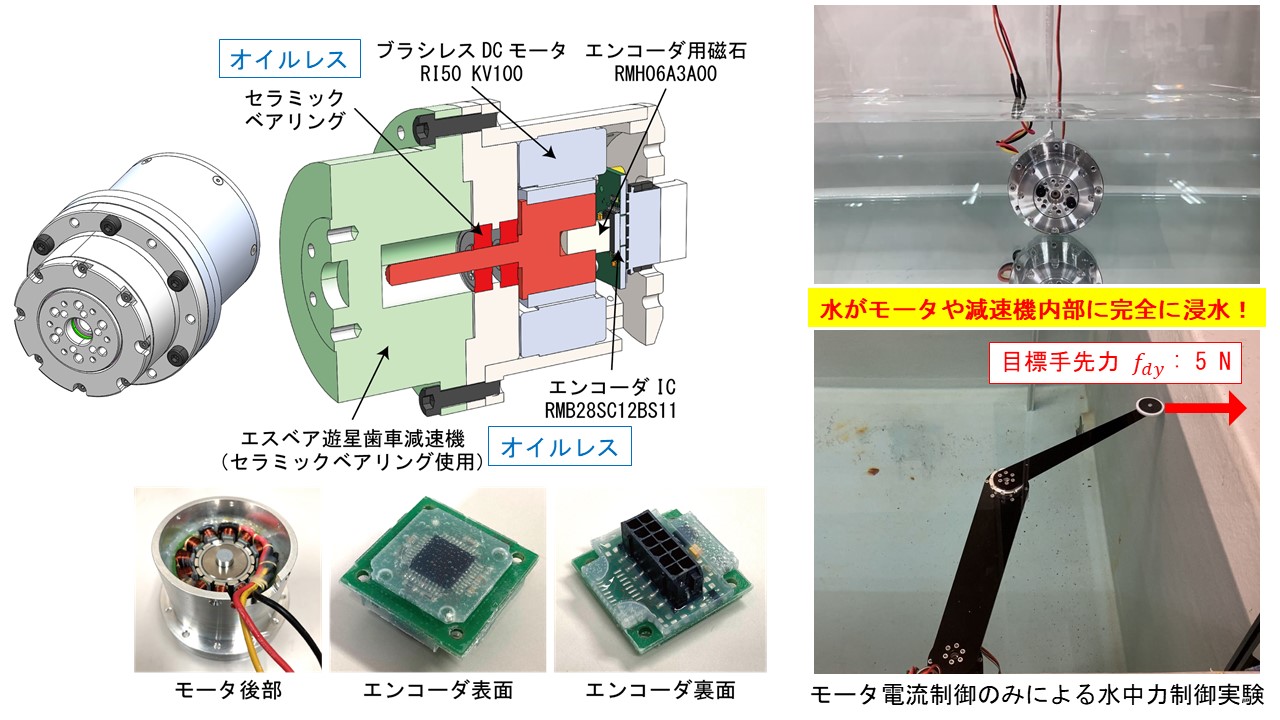
そのため,本研究では水中遊泳ロボットの関節に防水シールを必要としない水没型ギアード電動サーボモータを採用し,水がモータや減速機内部に完全に浸水する状態では水中力制御性能にどのような効果があるのかを検証しています.
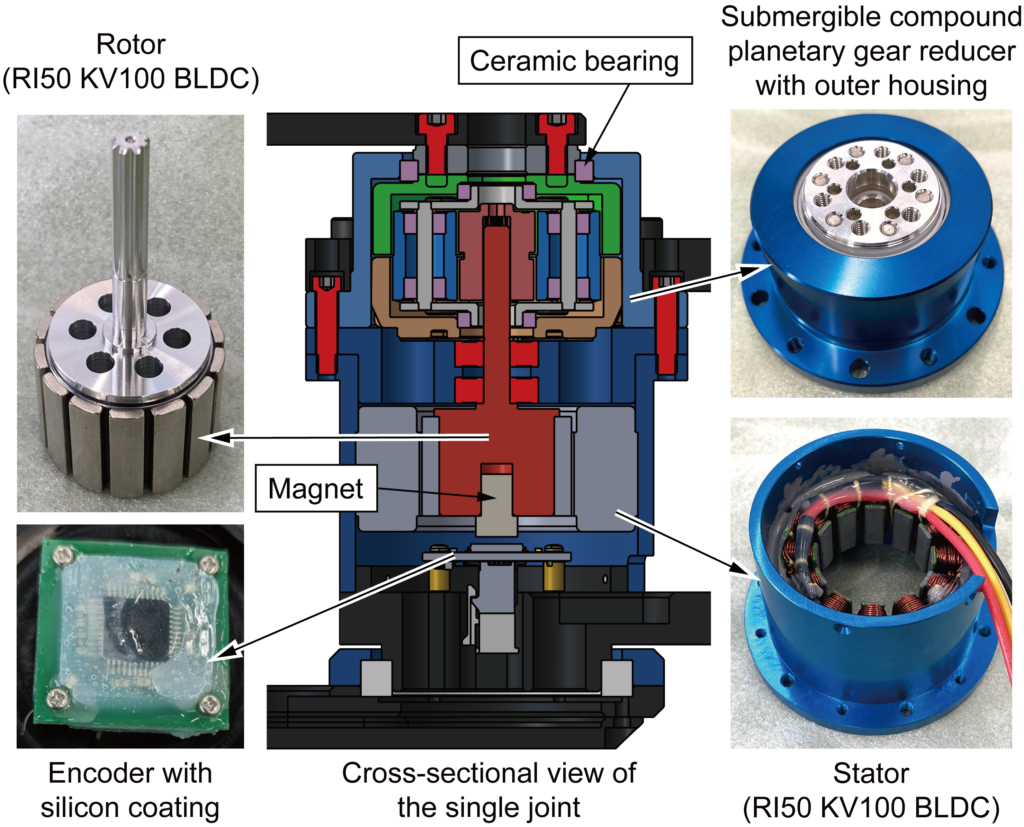
一般的な直流モータの場合,その出力トルクは電流に比例します.防水シールがなくなれば余計な摩擦の影響が小さくなり,モータ電流制御だけで関節トルクを制御しやすくなります.このような特徴を活かして,水中ヘビ型ロボットを構造物に巻き付かせてみたり,水中の狭い隙間で環境からの力を上手く制御しながら進んだり,というような水中環境との新しい相互作用の実現を目指しています.
モータには防錆処理を施したブラシレス直流モータを使い,減速機にはスターライト工業株式会社製のエスベアDDという樹脂製のギアを用いています.潤滑油不要で高い摺動性や耐熱性を有しているため,水中での利用に向いています.また,全ての軸受にセラミックス製のベアリングを用いています.
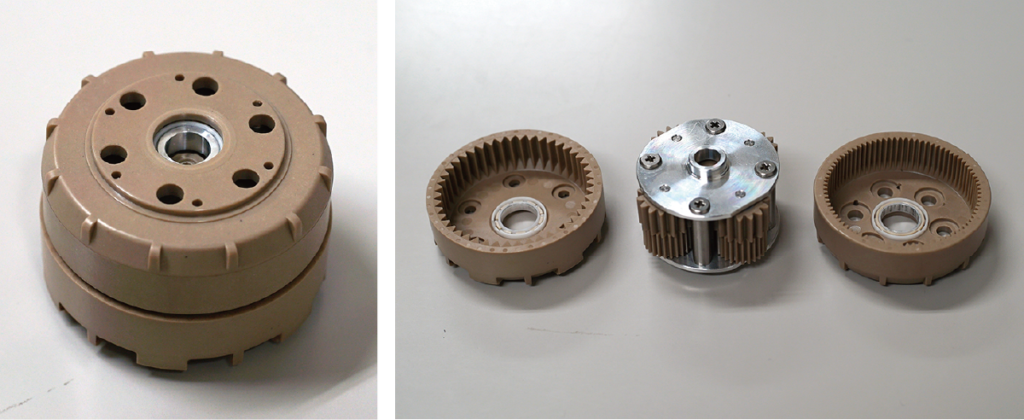
※本成果は,科学研究費助成事業(基盤研究(B))「トルクセンサレス・シーリングレス水陸両用柔軟アクチュエータの基礎研究」22H01456の支援を受けました.本研究の減速機にはスターライト工業株式会社製のS-BEAR DD4830を用いています.
関連文献
- Atsushi Kakogawa, Shah Darshankumar Rajendrakumar, and Yuto Iwasaki, Grasping of Cylindrical Structures using an Underwater Snake Robot without Force/Torque Sensors and Actuator Waterproofing, Journal of Robotics and Mechatronics, Vo. 36, Iss. 6, pp. 1458-1467, 2024
- Shah Darshankumar Rajendrakumar, Atsushi Kakogawa, and Shugen Ma, An Underwater Snake Robot that Does Not Consider Actuators’ Waterproof: Design and Primary Experiments, Proc. The 2023 IEEE Int. Conf. Robotics and Biomimetics (ROBIO 2023), pp.226-231, 2023
- 岩崎裕斗,加古川篤,水中ヘビ型ロボットによる力/トルクセンサレス円柱構造物把持,日本機械学会ロボティクス・メカトロニクス講演会,2025
- Wang, Lang,加古川篤,Liu, Zaiyang,岩崎裕斗,水中ヘビ型ロボットの尾鰭の剛性と長さが運動効率に与える影響,第43回日本ロボット学会学術講演会,2025