2025 JSME Conference on Robotics and Mechatronics (ROBOMECH2025) was held at Yamagata Big Wing from June 4-7. M2 students Shimizu and Fukunaga, M1 students Iwasaki, Ise, Sugisaki, Nakamura, and Assistant Professor Kominami presented their research in poster sessions.
Below are the topics ( 〇 presenter) :
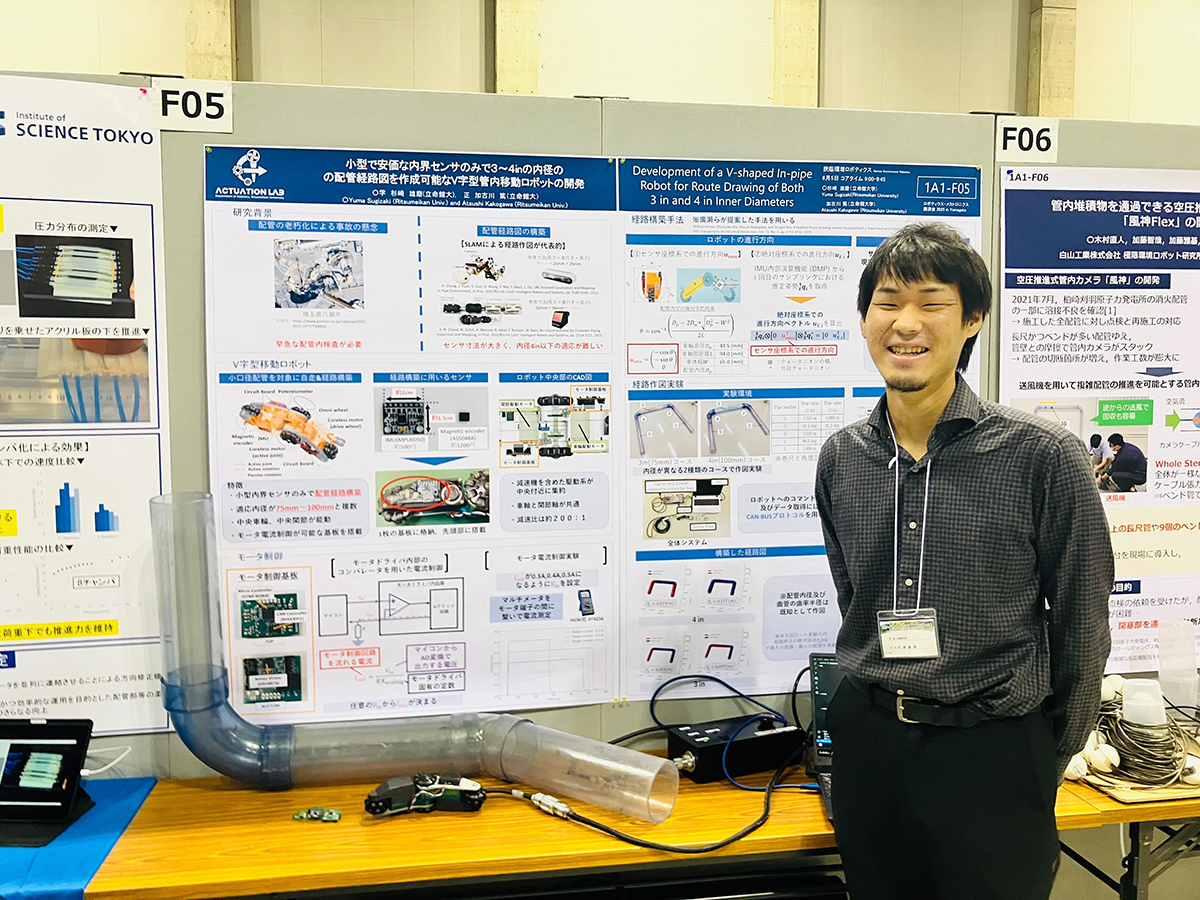
- 〇杉崎雄磨,加古川篤,3および4インチの内径の配管経路図を作成可能なV字型管内移動ロボットの開発
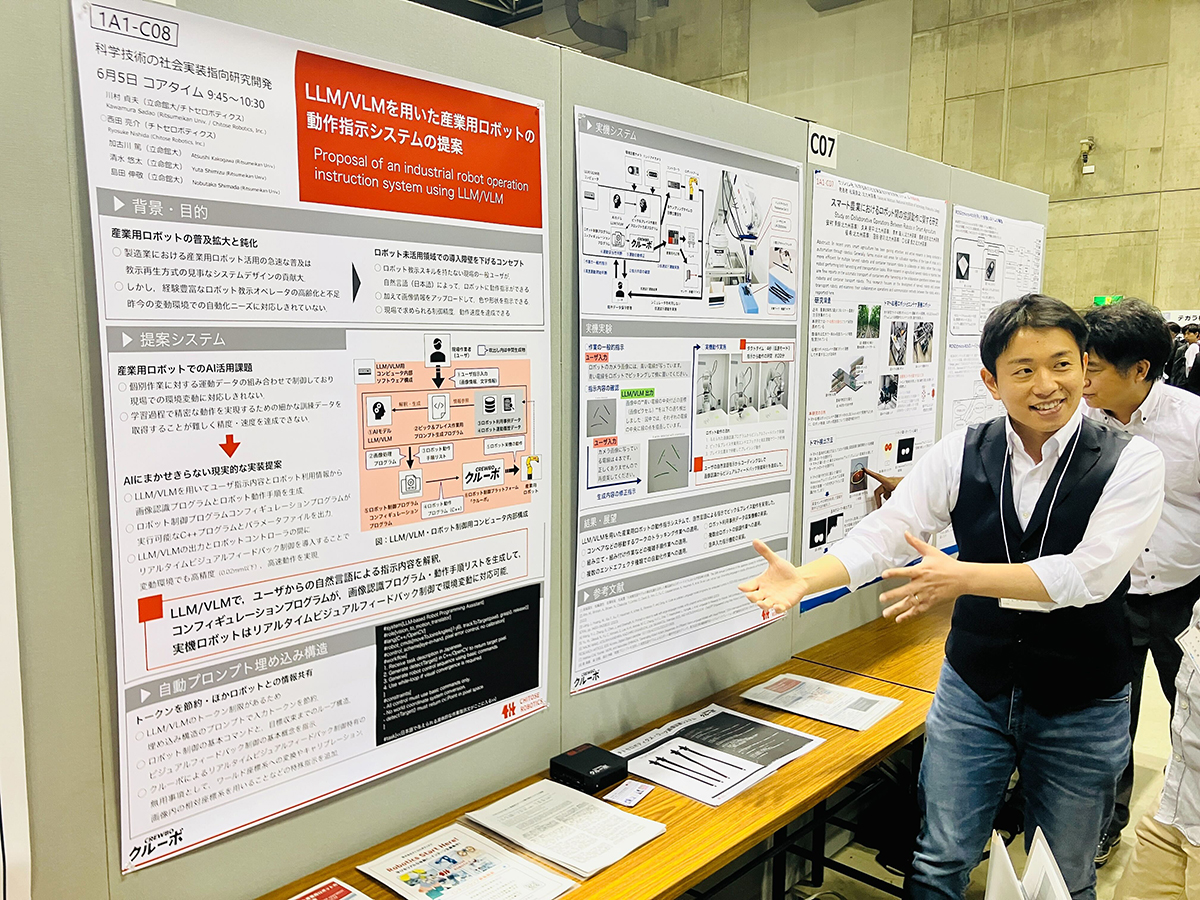
- 川村貞夫,〇西田亮介,加古川篤,清水悠太,島田伸敬,LLM/VLMを用いた産業用ロボットの動作指示システムの提案(※株式会社チトセロボティクスとの共同研究の成果です)
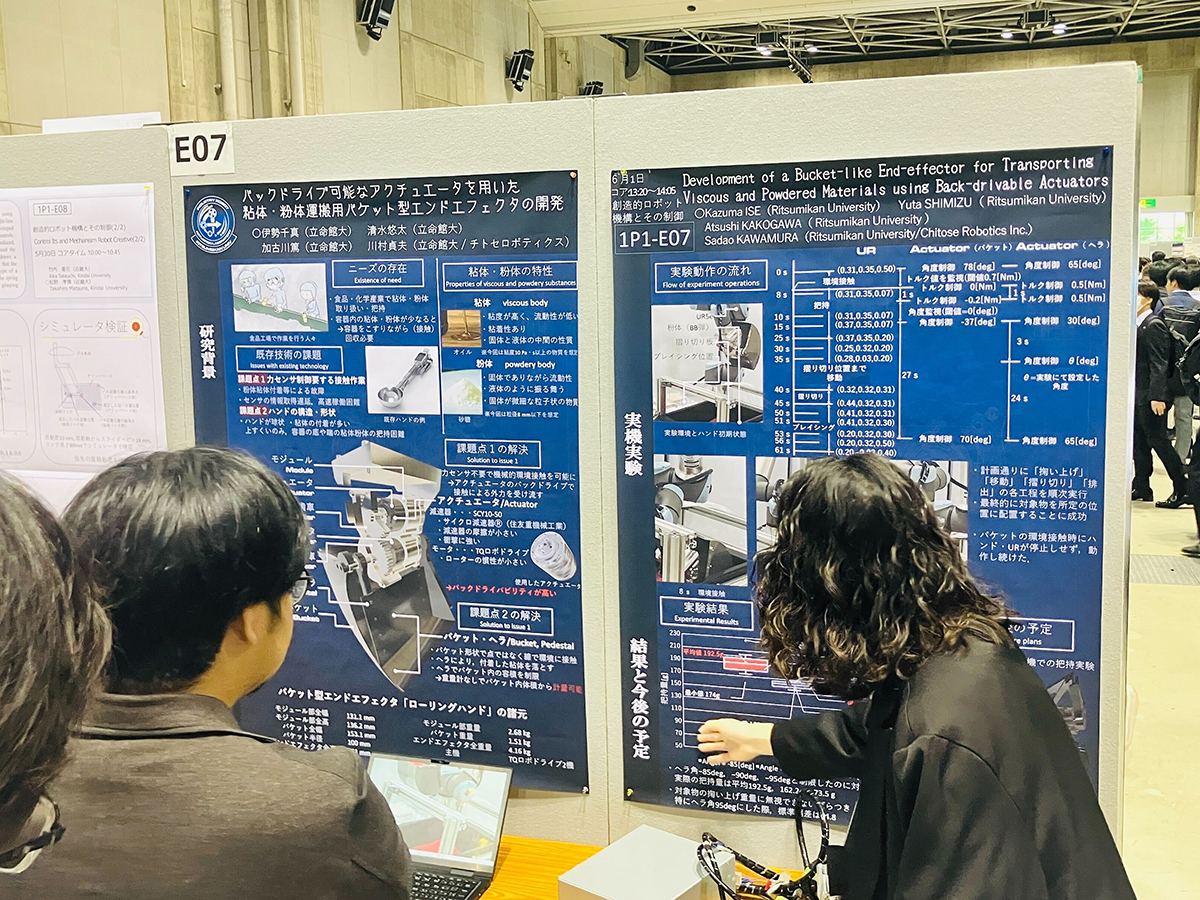
- 〇伊勢千真,清水悠太,加古川篤,川村貞夫,バックドライブ可能なアクチュエータを用いた粘体・粉体運搬用バケット型エンドエフェクタの開発
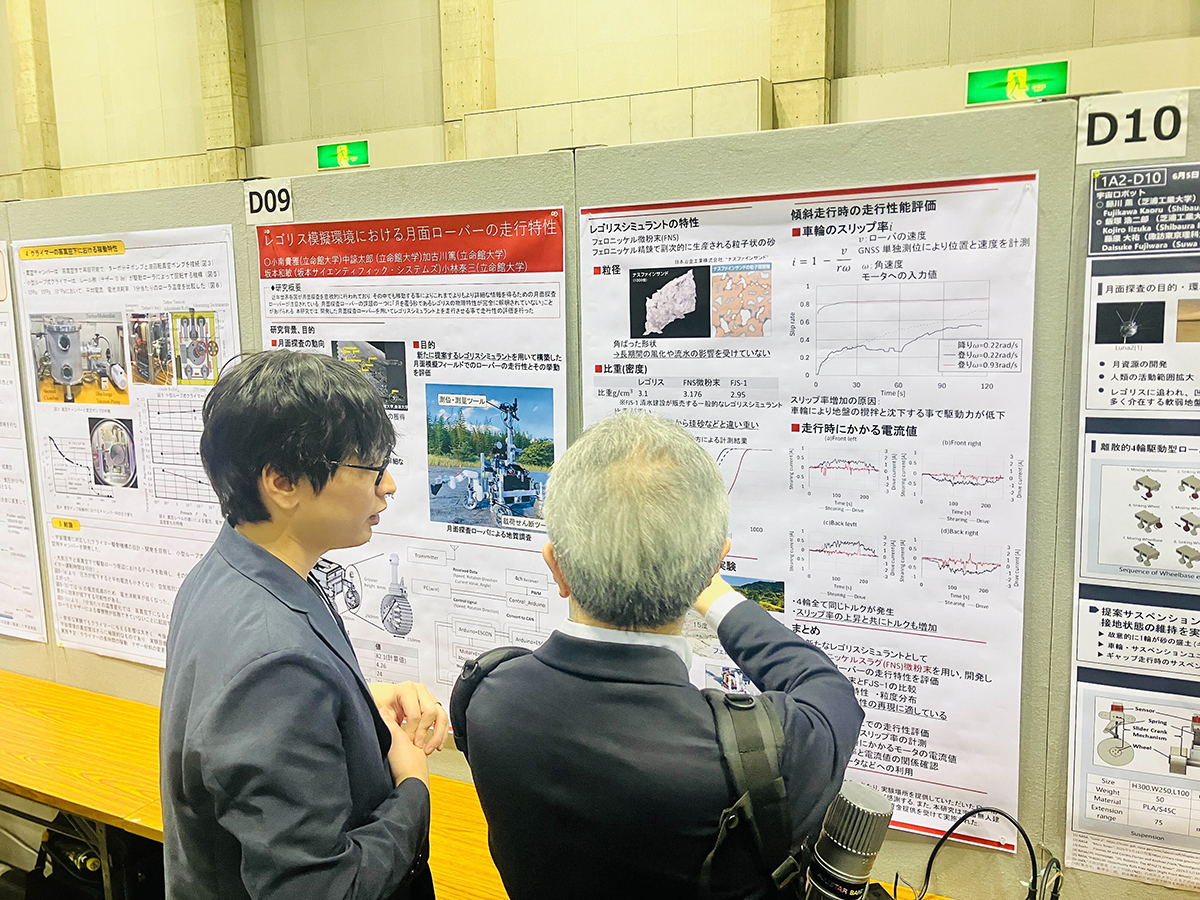
- 〇小南貴雅,中諒太郎,加古川篤,坂本和敏,小林泰三,レゴリス模擬環境における月面ローバーの走行特性
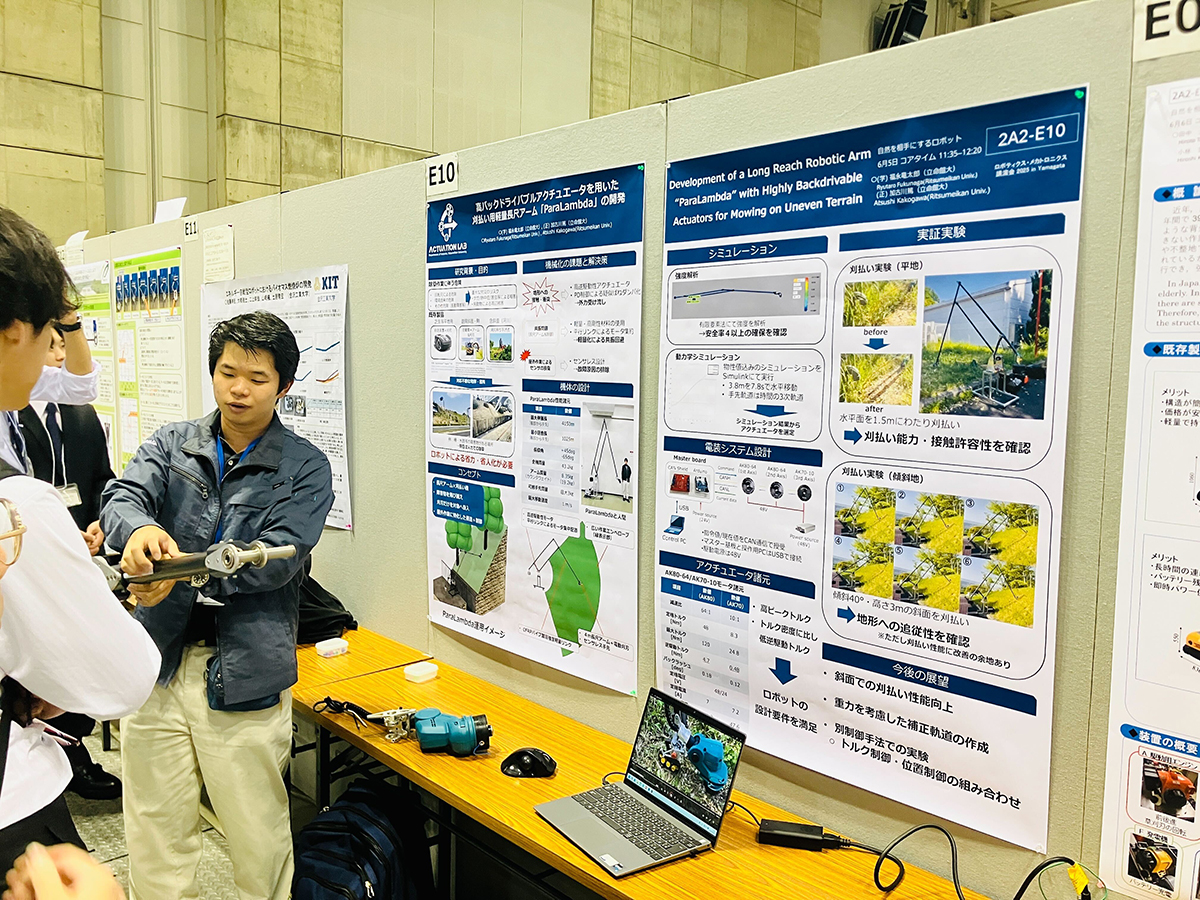
- 〇福永竜太郎,加古川篤,高バックドライバブルアクチュエータを用いた刈払い用軽量長尺ロボットアーム「ParaLambda」の開発
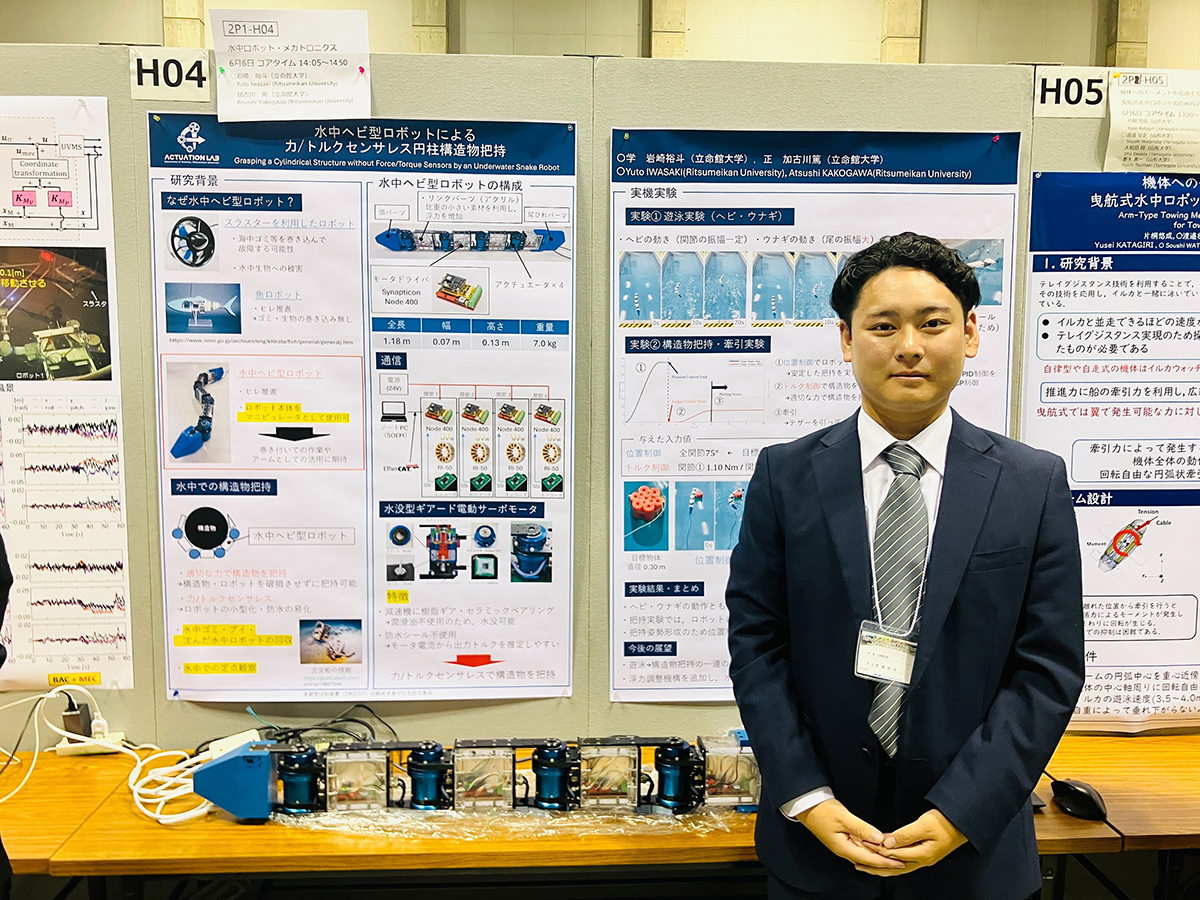
- 〇岩崎裕斗,加古川篤,水中ヘビ型ロボットによる力/トルクセンサレス円柱構造物把持
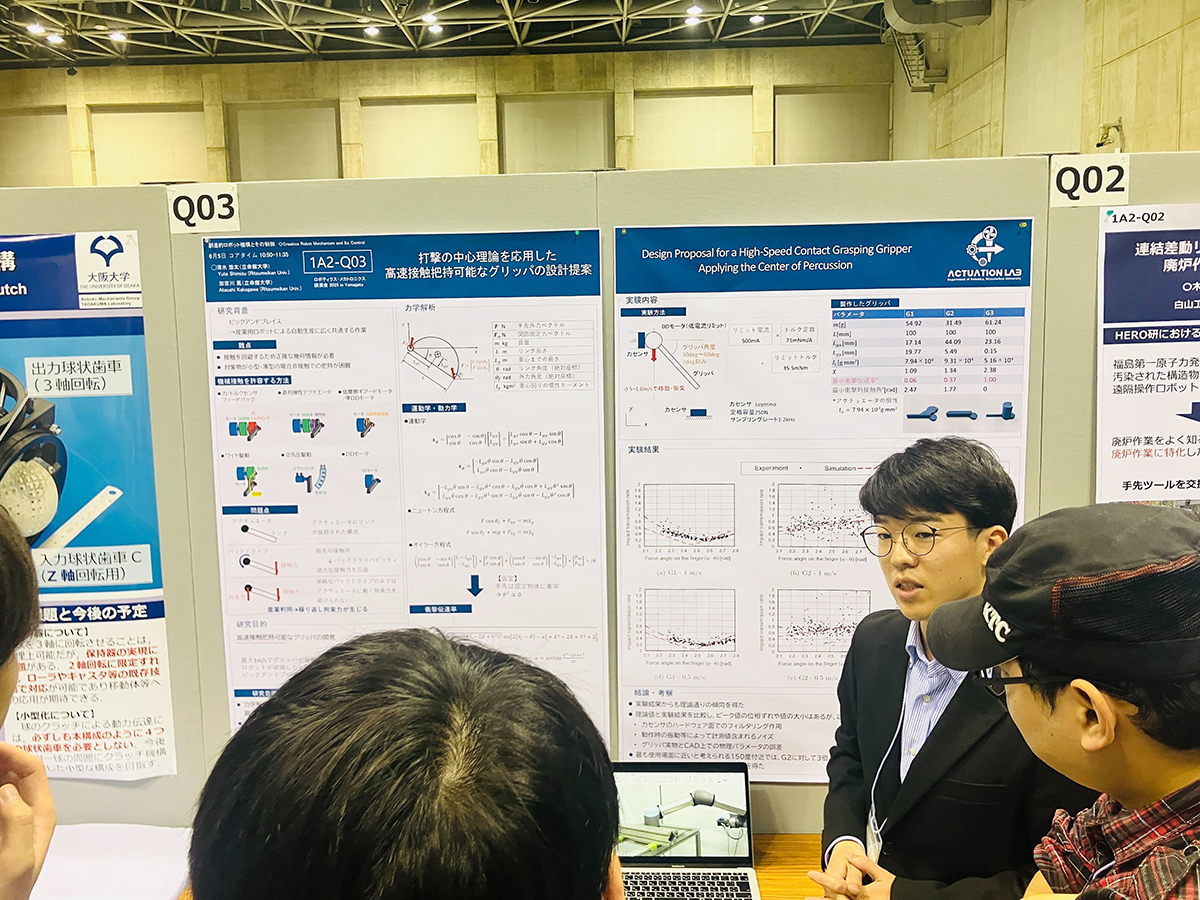
- 〇清水悠太,加古川篤,打撃の中心理論を応用した高速接触把持可能なグリッパの設計提案
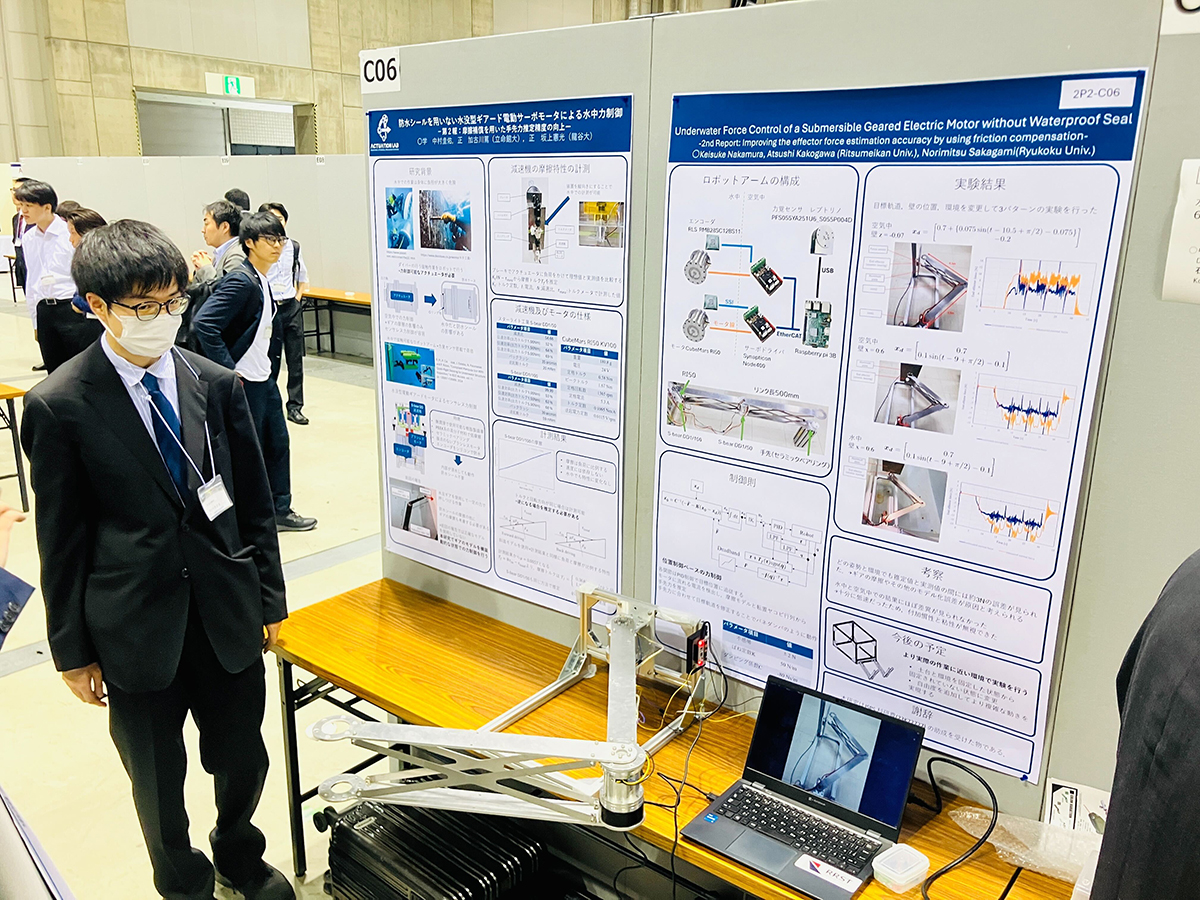
- 〇中村圭佑,加古川篤,坂上憲光,防水シールを用いない水没型ギアード電動サーボモータによる水中力制御-第2報:摩擦補償を用いた手先力推定精度の向上-(※龍谷大学 坂上憲光研究室との共同研究の成果です)