



ロボットアームやヘビ型ロボットなどは2個以上の多くの関節で構成されていることが多く,その運動のモデル化は複雑化します.本研究では,そんな多関節移動体の力学モデル(動力学・静力学を含む)を構築し,設計や制御に活かす取り組みを行っています.ロボットアームのようにベースがしっかりと固定されていて動かないものであれば,モデル化はしやすいです.しかし,ヘビ型ロボットのようにそれ自体が多関節かつ移動する場合,モデルはより複雑化します.さらに,環境と接触し,運動が拘束される場合は外力の計算なども加わるため,もっと複雑化します.これらの多関節移動体の力学モデルを利用した例を少しご紹介します.
蛇行推進の動力学
ヘビ型ロボットなどが蛇行推進するときの理想的な運動形態は既によく知られています.これはサーペノイド曲線と呼ばれていて,関節角度を時間に対して正弦波になるように駆動すれば実現できます.このとき地面から受ける反力(地面を蹴り出す力)をクーロン摩擦モデルなどを用いて導出し,運動に必要な力(関節トルク)を求めることができます.ここで紹介した研究では,並列弾性アクチュエータがヘビ型ロボットの関節トルクにどのように寄与するかを調べるためにこの動力学モデルも用いました.もちろん,逆に関節に指定したトルクを加えた場合にロボットがどのような運動をするか?ということも計算により導くことができます.ただし,クーロン摩擦モデルが現実と一致しにくいことやモータの減速機の摩擦が誤差となって現れることなどから,実験とシミュレーションを照らし合わせてモデルをどの程度まで信頼できるかを調べる必要があります.そのためにも実験は非常に重要です.
※本成果は,立命館大学生物知能機械学研究室との共同研究の結果,生まれたものです.
関連文献
- Atsushi Kakogawa, Taihei Kawabata, and Shugen Ma, Plate-springed Parallel Elastic Actuator for Efficient Snake Robot Movement, IEEE/ASME Transactions on Mechatronics, Vol. 26, Iss. 6, pp. 3051-3063, 2021
- Atsushi Kakogawa, Taihei Kawabata, and Shugen Ma, Plate Springed Parallel Elastic Actuators for Efficient Movement of a Planar Snake Robot, Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2019), pp. 235-240, 2019
- 加古川篤,川端泰平,馬書根,並列弾性アクチュエータを用いたヘビ型ロボットの低速運動時におけるエネルギー消費抑制,システム制御情報学会論文誌,32巻,6号,pp. 227-233, 2019
- 加古川篤,馬書根,並列弾性アクチュエータを用いた高効率2次元ヘビ型ロボットの剛性設計,第62回システム制御情報学会研究発表講演会 (SCI’18),2018
- Atsushi Kakogawa, Soo Jeon, and Shugen Ma, Stiffness Design of a Resonance-based Planar Snake Robot with Parallel Elastic Actuators, IEEE Robotics and Automation Letters (RA-L), Vol. 3, Iss. 2, pp. 1284-1291, 2018
連結車輪型配管内検査ロボットの静力学
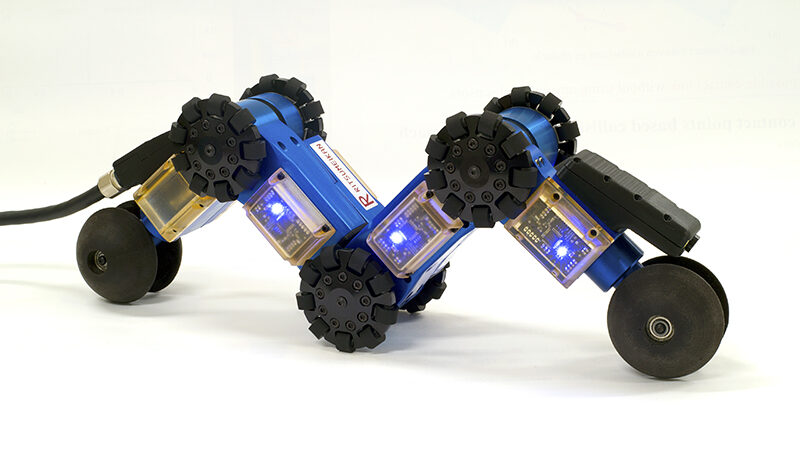
本研究室で開発している連結車輪型配管内検査ロボットの場合,関節が3つありますが,これらはばねの復元力やモータで回転し,車輪を管内壁面に突っ張れる仕組みになっています.また,3つの関節全てに車輪を備えており,それぞれ駆動可能です.しかし,ばねの剛性や自然角度などのパラメータに応じて壁面から受ける外力がどう変化するかわかっていませんでした.そこで,静力学モデルを立てて,真っすぐな配管や曲がった配管で関節のトルク(ばねやモータによる)と壁面外力との間の関係を導出し,垂直状態でも滑らないためのばねの設計パラメータや必要なモータトルクなどの計算を行いました.
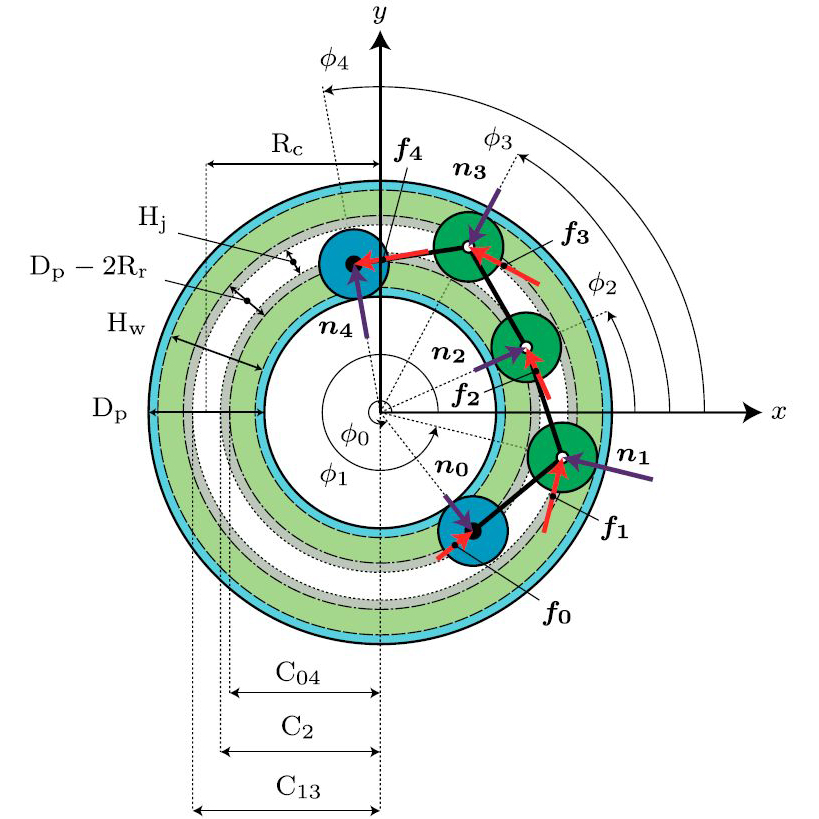
これにより,ロボットが垂直の配管を上る場合,3つの関節と3つの車輪のうち,どこを駆動させるべきかがわかってきました.例えば,3つのうち,2つの関節を出来るだけ強いばねで突っ張らせて,同様に2つの車輪を出来るだけ強力なモータで駆動するとします.当初はこのようなばねとモータの配置が効果的だと考えていました.しかし,実際に力学モデルを立てて解析してみたところ,ばねトルクやモータ出力は小さくても良いので,3つの関節に分散させて全て配置した方が良いという結果となりました.また,車輪が滑らないためには中央関節のトルクが最も重要であるという結果になりました.そのため,現在の連結車輪型配管内検査ロボットにはこの設計法が採用されていて,全ての関節と車輪がばねやモータで突っ張り力を生み出す仕組みになっています.そして,最も重要な中央関節のトルクはモータにより調整できるようになっています.
※本成果は,立命館大学生物知能機械学研究室との共同研究の結果,生まれたものです.
関連文献
- Atsushi Kakogawa, Kenya Murata, and Shugen Ma, Automatic T-branch Travel of an Articulated Wheeled In-pipe Inspection Robot Using Joint Angle Response to Environmental Changes, IEEE Transactions on Industrial Electronics, Vo. 70, Iss. 7, pp. 7041-7050, 2023
- Atsushi Kakogawa and Shugen Ma, Design of a Multilink-articulated Wheeled Pipeline Inspection Robot using Only Passive Elastic Joints, Advanced Robotics (Selected and extended paper from IROS 2016), Vol. 32, Iss. 1, pp. 37-50, 2018
- Atsushi Kakogawa and Shugen Ma, Design of a Multilink-articulated Wheeled Inspection Robot for Winding Pipelines: AIRo-II, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2016), pp. 2115-2121, 2016