



私たちが長年研究開発してきた連結車輪型管内検査ロボットは車軸と関節軸が共通化されているため小型化しやすいメリットがあるだけでなく,ジグザグの形を利用して内径の適応範囲を大きくすることが可能です.また,密閉構造も作りやすいという特徴も有しています.そこで本研究では,より実用性を考慮し,3インチ(約75mm)と4インチ(約100mm)の両方の内径に適応可能かつ防水防塵性を備えたロボット「AIRo-7.1」を新たに開発しました.
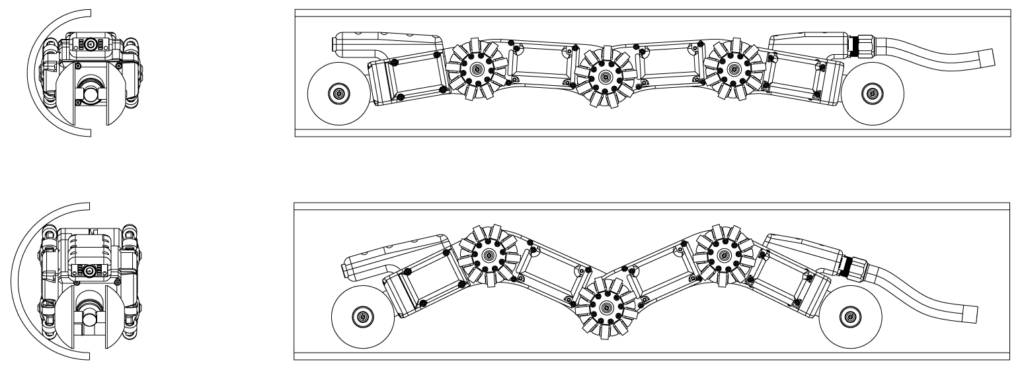
AIRo-5.2では,中央関節にポリウレタンを使った直列弾性アクチュエータが内蔵されており,角度とトルクの両方が制御可能でした.AIRo-7.1では,弾性体を使わずにモータの電流値のみから関節トルクを制御可能です.これは中央関節に使われている減速機が平歯車列のみで構成されており,グリスを塗布すれば摩擦損失が小さくなるためです.関節角度についてはAIRo-5.2と同様にポテンショメータを用いてフィードバック制御されます.防水防塵のために部品同士の隙間にはシリコングリスが塗布されており,ドライバ基板を収納する側面の樹脂筐体の隙間にはシリコンシートが挿入されています.2023年2月には滋賀県草津市の内径75mmの実際の下水道圧送管で実地試験を行いました.

※本研究は,令和4年度滋賀県近未来技術等社会実装推進事業補助金,Ritsumeikan Impact-Makers Inter X (Cross) Platform事業化助成金の支援を受けて実施されました.実地試験にあたり,草津市役所上下水道施設課および大五産業株式会社下水管路事業部の皆様にご協力いただきました.

関連文献
- Kenya Murata and Atsushi Kakogawa, Development of a Practical Articulated Wheeled In-pipe Robot for Both 3-4 in Force Main Inspection of Sewer Pipes, 29th International Symposium on Artificial Life and Robotics (AROB 29th 2024), 9th International Symposium on BioComplexity (ISBC9), 7th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM7), pp. 526-531, 2024
- 村田憲哉,廣瀬千大,加古川篤,馬書根,下水道圧送管内点検のための連結車輪型管内移動ロボットの開発,日本機械学会ロボティクス・メカトロニクス講演会 2023,1A1-B11,2023