



ばねなどの弾性体は弾くと振動します.この状態では,弾性エネルギと運動エネルギの変換が行われ,エネルギ散逸による損失が無ければ永遠に振動し続けます(単振動).一方,ロボットにも振動のような周期的な運動が必要になることがあります.例えば脚を使った歩行運動,マニピュレータのピックアンドプレイス,ヘビ型ロボットの蛇行推進などです.これらの運動と弾性体の振動を上手く調和(共振)させることができれば,エネルギ効率を著しく向上させられる可能性があります.このような方法は並列弾性アクチュエータ(Parallel Elastic Actuator,通称PEA)と呼ばれていて,こちらでも既に紹介しています.
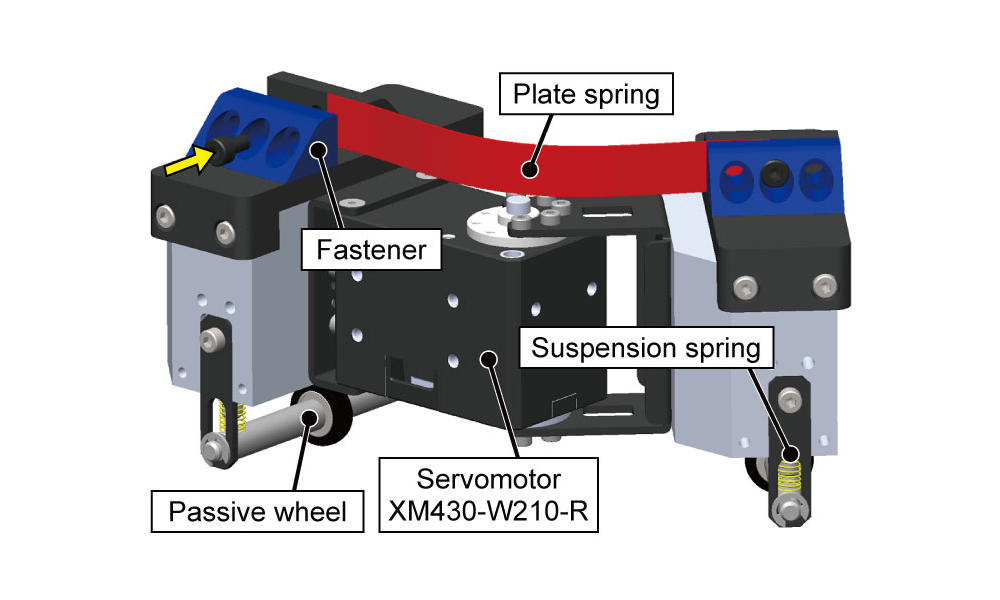
本研究では,まず初めにコイルばね式のPEAを利用したヘビ型ロボットのエネルギ効率に着目することころから開始しました.動力学シミュレーションと実験により,ヘビ型ロボットの中間関節のばねが最も効果的にエネルギ消費を低減させるのに対し,末端関節のばねは全く寄与しないことが明らかになりました.しかし,コイルバネ式PEAは、1つの関節につき2つの圧縮コイルばねが必要であり,左右対称の復元モーメントを発生させるためにロボット側面の左右に取り付けていました.そのため,サイズが大きくなり,ばねが環境に接触する危険性などがありました.この問題を解決するために,本研究では,板ばね式並列弾性アクチュエータ(Plate-Springed PEA,通称PSPEA)を提案しています.


※本成果は,立命館大学生物知能機械学研究室やウォータールー大学Mechanical Systems & Control Laboratoryとの共同研究の結果,生まれたものです.また,科学研究費助成事業(若手研究)「板バネとDDモータによる周期運動のための高効率小型並列弾性アクチュエータの研究」19K14949の支援を受けました.
関連文献
- Atsushi Kakogawa, Taihei Kawabata, and Shugen Ma, Plate-springed Parallel Elastic Actuator for Efficient Snake Robot Movement, IEEE/ASME Transactions on Mechatronics, Vol. 26, Iss. 6, pp. 3051-3063, 2021
- Atsushi Kakogawa, Taihei Kawabata, and Shugen Ma, Plate Springed Parallel Elastic Actuators for Efficient Movement of a Planar Snake Robot, Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2019), pp. 235-240, 2019
- 加古川篤,川端泰平,馬書根,並列弾性アクチュエータを用いたヘビ型ロボットの低速運動時におけるエネルギー消費抑制,システム制御情報学会論文誌,32巻,6号,pp. 227-233, 2019
- 加古川篤,馬書根,並列弾性アクチュエータを用いた高効率2次元ヘビ型ロボットの剛性設計,第62回システム制御情報学会研究発表講演会 (SCI’18),2018
- Atsushi Kakogawa, Soo Jeon, and Shugen Ma, Stiffness Design of a Resonance-based Planar Snake Robot with Parallel Elastic Actuators, IEEE Robotics and Automation Letters (RA-L), Vol. 3, Iss. 2, pp. 1284-1291, 2018
本研究の参考となった先行研究
- S. Hirose, Biologically Inspired Robots, London, U.K.: Oxford University Press, 1993
- D. W. Robinson, J. E. Pratt, D. J. Paluska and G. A. Pratt, Series elastic actuator development for a biomimetic walking robot, Proc. IEEE/ASME Int. Conf. Adv. Intell. Mechatron., pp. 561-568, Sep. 1999
- J. Hurst and A. Rizzi, Series compliance for an efficient running gait, IEEE Robot. Autom. Mag., vol. 15, no. 3, pp. 42-51, Sep. 2008
- M. Uemura, K. Kanaoka, and S. Kawamura, A new control method utilizing stiffness adjustment of mechanical elastic elements for serial link systems, Proc. IEEE Int. Conf. Robot. Autom., pp. 1437–1442, 2007
- M. Uemura and S. Kawamura, Resonance-based motion control method for multi-joint robot through combining stiffness adaptation and iterative learning control, Proc. IEEE Int. Conf. Robot. Autom., pp. 1543-1548, 2009
- M. Uemura,, H. Goya and S. Kawamura, Motion control with stiffness adaptation for torque minimization in multijoint robots, IEEE Trans. Robot., vol. 30, no. 2, pp. 352-364, 2014
- K. Ono, T. Furuichi and and R. Takahashi, Self-excited walking of a biped mechanism with feet, Int., J. Robot. Res., vol. 20, no. 12, pp. 953-966, 2001
- J. Ute and K. Ono, Fast and efficient locomotion of a snake robot based on self-excitation principle, Proc. 7th Int. Workshop Adv. Motion Control, pp. 532–539, 2002
- D. Efimov, A. Fradkov and and T. Iwasaki, On finite time resonance entrainment in multi-DOF systems, Proc. Amer. Control Conf., pp. 1035-1039, 2012