



本研究室で研究してきたM字型の構造を使えば,配管内で関節を突っ張らせることにより,車輪と壁面の接触を維持でき,高い曲管・T字管適応性と牽引性能を実現できることが明らかとなりました.また,車軸と関節軸を共通化することにより,リンクの可動範囲を大きく取れるため,適応内径の範囲も大きくできる利点がありました.
しかし,リンク数が3つないし4つ以上の構造では,面外曲げと呼ばれる曲管を走行できませんでした.面外曲げを走行可能なロボットは既にいくつか報告されていますが,これらのロボットの多くは,複数の小径車輪を備えた駆動ユニット同士を受動関節で繋いだ構造になっています.この単一の駆動ユニットに内蔵されたサイズ拡張機構には可動範囲の制約があり,配管内径変化への適応範囲が小さいという問題がありました.
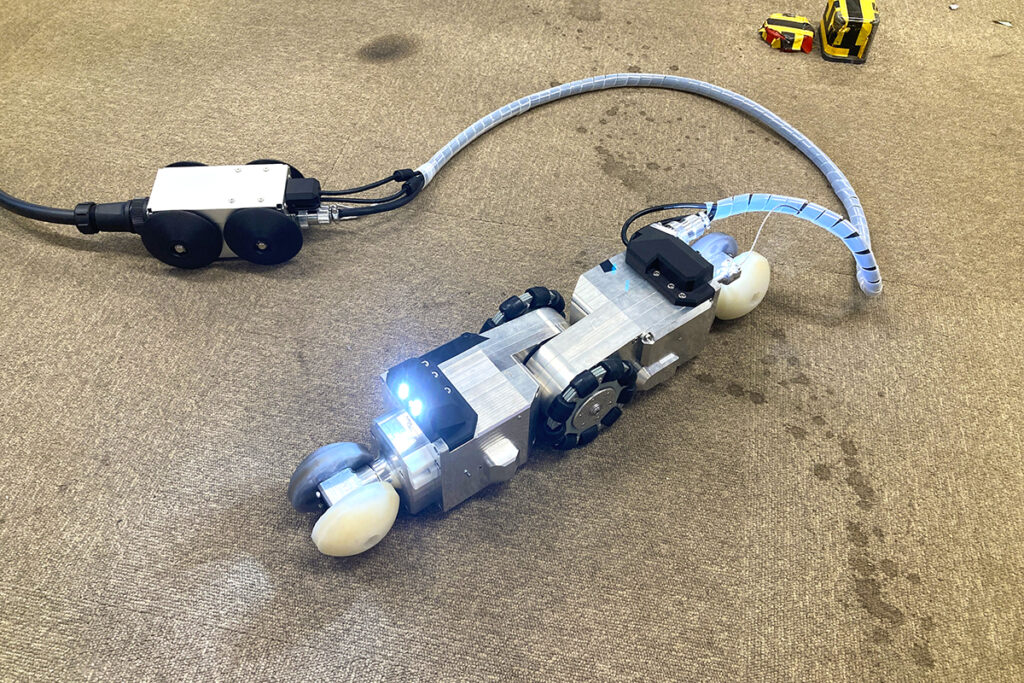
そこで本研究では,連結車輪型が持つ適応内径の高い可動範囲を維持したまま,面外曲げにも適応可能なV字型配管内検査ロボット「AIRo-6.3」を提案しました.M字型の構造に比べると,T字管適応性は低下しますが,面外曲げや伏せ越しなどの狭い空間で連なった曲管回路を複雑な操作無しで適応できる利点があります.
AIRo-6シリーズ
適応内径は8インチ(約200mm)と中口径の配管点検ニーズに合わせて開発しました.外見の構造は後述の
AIRo-3シリーズとほとんど変わりませんが,関節をモータで能動的に屈曲できるため,滑りにくくなりました.また,前後の球場車輪の差動機構を廃止し,前進後退とロール回転はそれぞれ独立した2つのモータで駆動されるよう改良しました.実際に鋼管で試験も実施し,面外曲げや伏せ越しを問題なく通過できることを確認できました.
2023年には,大阪府某所の埋設管(ガス用)で実証実験を行い,垂直管に侵入後,約25mの点検が可能であることを確認いたしました.
※AIRo-6シリーズの成果は,日鉄パイプライン&エンジニアリング株式会社からの委託研究を実施した結果,生まれたものです.
関連文献
- Atsushi Kakogawa, Kanade Sekiya, Ryota Nakazawa, and Yasuyuki Ikuno, A V-shaped In-Pipe Robot to Travel through Complex Winding Pathways in Three Dimensions, Journal of Field Robotics, Vo. 42, Iss. 5, pp. 1808-1825, 2024
- 関谷奏,加古川篤,中澤良太,生野康之,実用的V字型配管内検査ロボットの開発とそのフィールド実験,第42回日本ロボット学会学術講演会,2024
- 関谷奏,廣瀬千大,村田憲哉,小林勇輝,加古川篤,馬書根,面外曲げ走行可能なV字型配管内検査ロボットの開発,日本機械学会ロボティクス・メカトロニクス講演会 2023,1A1-B13,2023
AIRo-3シリーズ
AIRo-3シリーズは,AIRo-6シリーズの原型になったもので,上記のV字構造を取り入れた内径4インチ(約100mm)に対応したロボットです.関節はバネで屈曲し,前後の球状車輪にはマイタギアを使ったシンプルな差動機構が取り入れられています.これにより,モータ1つで前進後退のための駆動力とロール回転(転がり)のための駆動力を生み出しています.どちらの運動を実現するかはモータの回転方向によって決定されます.
関連文献
- Yoshimichi Oka, Atsushi Kakogawa, Yang Tian, and Shugen Ma, Control Technique of a V-Shaped In-Pipe Robot Composed of Two Underactuated Roll-Pitch Joints, Advanced Robotics, Vo. 36, Iss. 4, pp. 205-216, 2021
- Yoshimichi Oka, Atsushi Kakogawa, and Shugen Ma, A Wheeled V-shaped In-pipe Robot with Clutched Underactuated Joints, Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2021), pp. 11457-11462, 2021
- Yoshimichi Oka, Atsushi Kakogawa, and Shugen Ma, Stopper Angle Design for a Multi-link Articulated Wheeled In-Pipe Robot with Underactuated Twisting Joints, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018), pp. 973-978, 2018
- Atsushi Kakogawa, Yoshimichi Oka, and Shugen Ma, Multi-link Articulated Wheeled In-pipe Robot with Underactuated Twisting Joints, Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA 2018), pp. 942-947, 2018
- 岡義倫,加古川篤,馬書根,車軸と体軸に差動機構を有する連結車輪型管内移動ロボットの開発,日本機械学会ロボティクス・メカトロニクス講演会 2017,2A2-A10,2017