



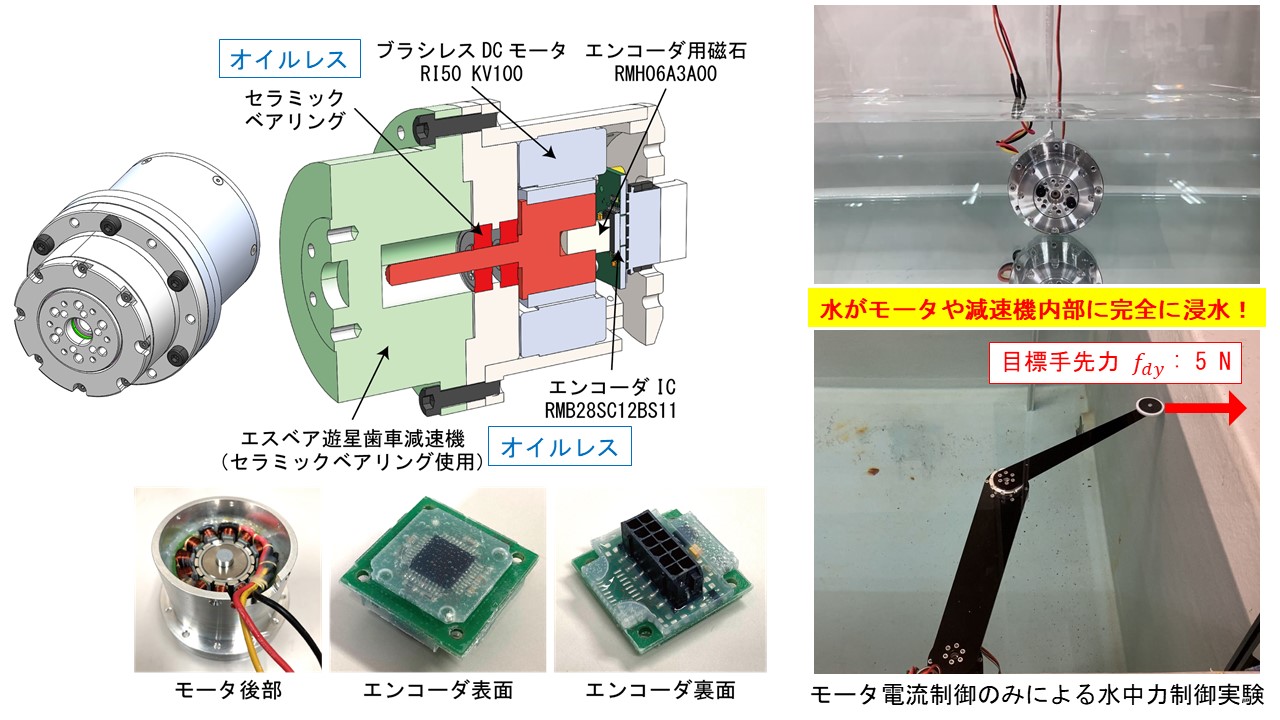
本研究室では,これまでに防錆処理したブラシレスDCモータとエンコーダに高分子材料製の潤滑油レス減速機を用いた水没型ギアード電動サーボモータを提案してきました.防水シールが一切なく,減速機摺動部の摩擦も小さいため,モータ電流から関節トルクを推定しやすくなっています.これにより,水中環境でも力/トルクセンサを使わずに多軸ロボットの力を制御しやすくなりました.本グリッパは,この水没型ギアード電動サーボモータを水中用途に応用したものです.
物体を把持するためには最低2本の指が必要であり,それぞれを同時に互い違いに正転/逆転させなければなりません.この運動を実現する方法として,2つのアクチュエータを用いて独立に駆動する方法を真っ先に思いつくかもしれません.しかし,水没型ギアード電動サーボモータを用いる場合,可能な限り防錆箇所を減らした方が製作の手間を減らせます.また,グリッパであれば一般的にエンドエフェクタとして利用されるため,水中とはいえ軽量化が重要です.モータはコイル,コア,永久磁石などの金属で構成されており,グリッパ全体に占める質量の割合が大きくなります.そこで本グリッパには,伝達機構を工夫してモータ1個から2つの正逆運動を取り出す方法が採用されています.減速機は高分子材料であり,比重が水に近いため,金属に比べればはるかに軽くなります.
モータ1個から把持動作を生み出す方法は数多く提案されてきました.特に,カム機構を使ったものが広く利用されており,製品として販売されているものもあります.しかし,カム機構では構造自体の摩擦が大きいため水中力制御するという趣旨からは逸れてしまいます.一方,平歯車を2つ組み合わせたり,マイタギアを3つ使うことによっても正逆運動を取り出すことができます.しかし,歯の噛合率が下がるため,高分子材料製の歯車を使う場合には耐久性を上げるためにモジュールを大きくして構造全体を大きくしなければなりません.
そこで本グリッパでは,3-K型差動遊星歯車機構(複合遊星歯車機構)の内部歯車を組み替えただけの単純な原理を用いて正逆運動を取り出すことにしました.遊星歯車機構は遊星数に応じて荷重分担するため,衝撃力を内部に分散させることができます.また,部品を共通化させているため,射出成形などで製造する高分子材料製のギアであれば,量産すると1個あたりのコストダウンを図れます.
本研究に関連する要素研究
※本成果は,スターライト工業株式会社との共同研究の結果,生まれたものです.
関連文献
- 加古川篤,奥島規志,坂上憲光,正逆の差動遊星歯車減速機を用いた1 自由度水没型グリッパ,日本機械学会ロボティクス・メカトロニクス講演会 2023,1P1-C09,2023