



近年,深刻化する配管インフラの老朽化を受けて様々な配管内検査装置が開発されています.これらの管内走行機構において,本体を細い管の奥深くまで移動させるためには,移動のためのアクチュエータが大きな力を生み出せるだけでなく,管内壁面との滑りをいかに抑制するかが重要となります.そのため,管内壁面との接触部分の材料を工夫して摩擦係数を上げたり,モータなどで押し付け力(垂直抗力)を増やして最大静止摩擦力を上げる方法が散見されます.
しかし,配管内検査という実際の用途を考慮すると,万が一電源系統を全て失ってしまった場合でも,人間が手動で入口からケーブルを手繰り寄せて回収可能か否かが非常に重要となります.その点で,滑りにくく走破性の高い管内走行機構は,手動回収性能が悪いという矛盾を抱えることになります.
既存の配管内検査ロボットでは,管の内径が細くなるにつれて蛇のような多関節構造を採用し,軸方向の空間を利用して機能を増やす設計が取り入れられてきました.本研究室のAIRoもそうです.特に曲がりくねった経路を走行する場合にこのような方法は効果的です.しかし,単一軸周りの関節を平行に複数並べて繋いだだけの多関節構造の場合,ロボットの姿勢と曲管の方向が合っていないと幾何学的に通過できません.そのため,自走性能は高い反面,緊急時の回収が非常に困難でした.
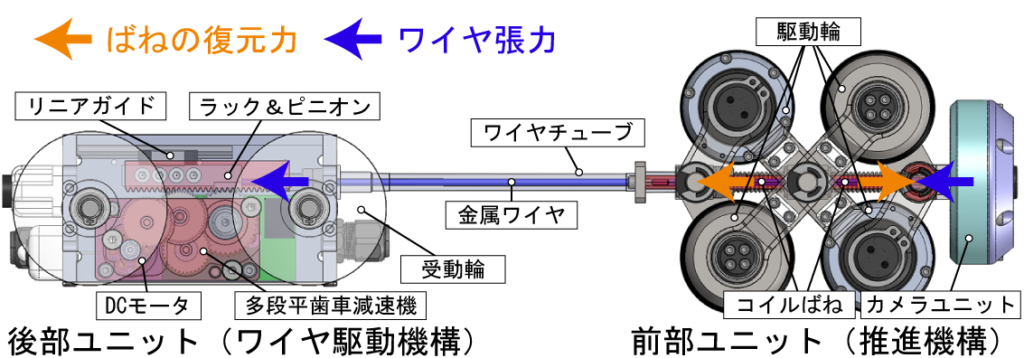
そこで本研究では,X状のリンク機構に並列弾性要素を持つワイヤ駆動機構とバックドライブ可能なラックアンドピニオン機構を組み合わせた新しい緊急脱出可能な配管内検査ロボット「Xbot」を提案しています.AIRoのように垂直T字管を走破する機能はありませんが,緊急時の手動回収が容易になりました.
2023年からは,滋賀県草津市の内径75mmの実際の下水道圧送管にXbotを通す実証実験を開始しました.同年7月には約20m走行し,内部の映像を撮影することに成功しました.2024年1月には草津市のお隣の滋賀県大津市でも実証実験を開始いたしました.




※本成果は,産業技術総合研究所との共同研究の結果,生まれたものです.また,令和4年度滋賀県近未来技術等社会実装推進事業補助金,Ritsumeikan Impact-Makers Inter X (Cross) Platform事業化助成金,産業技術総合研究所・立命館大学融合シーズ・スプラウト・プログラムの支援を受けて実施されました.実地試験にあたり,草津市役所上下水道施設課および大五産業株式会社下水管路事業部の皆様にご協力いただきました.
関連文献
- Atsushi Kakogawa, Ryota Taniguchi, and Tomonari Yamamoto, Development of a 3 in Sewer Pipe Inspection Robot with a Wire-driven Parallel Elastic Actuator for Emergency Evacuation, The 2025 IEEE International Conference on Real-time Computing and Robotics (RCAR 2025), pp. 691-696, 2025
- 加古川篤,下水道圧送管路点検のための自走式ロボット技術,公益社団法人日本下水道協会,下水道協会誌2024年12月号,61巻,746号,pp. 44-47,2024
- 加古川篤,下水道圧送管路点検用ロボットおよび配管経路作図システムの開発,環境新聞社,月刊下水道2024年6月号「明日につなぐ下水道特集」,47巻,7号,2024
- 加古川篤,山本知生,緊急脱出のためのワイヤ駆動式伸縮機構を有する3インチ管内検査ロボット「Xbot 1」の開発,日本機械学会ロボティクス・メカトロニクス講演会 2023,1A1-B12,2023