



アクチュエーションとは?
ここ数年でCPS(Cyber-Physical System:サイバーフィジカルシステム)という言葉が定着してきました.CPSはIoTよりも包括的な概念で,現実世界(フィジカル空間)からセンシングした情報をコンピュータやサーバなどの仮想世界(サイバー空間)に集め,解析し,それを現実世界へ反映して課題解決を図るものです.
この「現実世界への反映」には様々な方法がありますが,人に代わって機械などの人工物に何らかの作業をさせる場合,必ず機構・制御に代表されるアクチュエーション技術が必要になります.センシング技術が現実世界の物理量を数値化し,仮想世界で扱うための変換手段であるなら,アクチュエーション技術はその逆であり,現実世界に直接働きかけを行う物理的手段であると言えます.
本研究室の名前にもなっているアクチュエーションという言葉は,駆動源を意味するアクチュエータという言葉の派生ですが,私たちはアクチュエータそのものについて研究しているというよりはアクチュエーションをこの「現実世界(フィジカル空間)に直接働きかけを行う手段」という広義の意味として捉え,ロボットシステムやメカトロニクスの研究を行っています.
研究方針
本研究室の研究方針は主に以下の2つです.
既存の技術に新たな要素を付与して新しい価値を生み出そうとするものです.多少コストがかかっても良いので,必要最低数以上の要素をあえて追加し,今まで存在しなかったような非常に優れた性能を目指すものです.
例えば,既存のモータに弾性要素を加える直列弾性アクチュエータや並列弾性アクチュエータと呼ばれる方法もこれに該当しますし,関節が1つしかないのにモータ2個で動かす冗長駆動や干渉駆動と呼ばれる方法もこれに当たります.
こちらは上記とは逆の考え方で,いかに既存の方法で使われている要素を減らせるか?という取り組みになります.例えば,最近の電動モータは機電一体化の傾向が強く,一般的に電動モータ,減速機,エンコーダ,ドライバ回路で構成されています.機能を落とすことなく,これらのうちどれか一つでも減らすことができれば,小型化,軽量化,低コスト化などに寄与する可能性があります.さらに細かいことを言えば,配線,ネジ,潤滑油なども無くなれば従来の常識が大きく変わり,課題解決に繋がる可能性を秘めています.なにより,構造がシンプルになり,メンテナンスの容易さや低コスト化などにも繋がります.
例えば,多関節構造であれば能動関節の一部をバネや受動関節に代えてみるということもこの取り組みの一つであると言えますし,減速機を必要としないほど仕事ができるモータができたり,エンコーダなしで位置制御を可能にしたりする取り組みもこの範疇に入ると言えます.
指導方針
本研究室では,「好奇心・探究心」や「ワクワク」を大事にしています.学生の皆さんには可能な限り熱中できるような研究テーマに取り組んでいただき,結果的に最先端技術の創出や一人の人間としての成長に繋がるような仕組みづくり・環境作りを心掛けています.
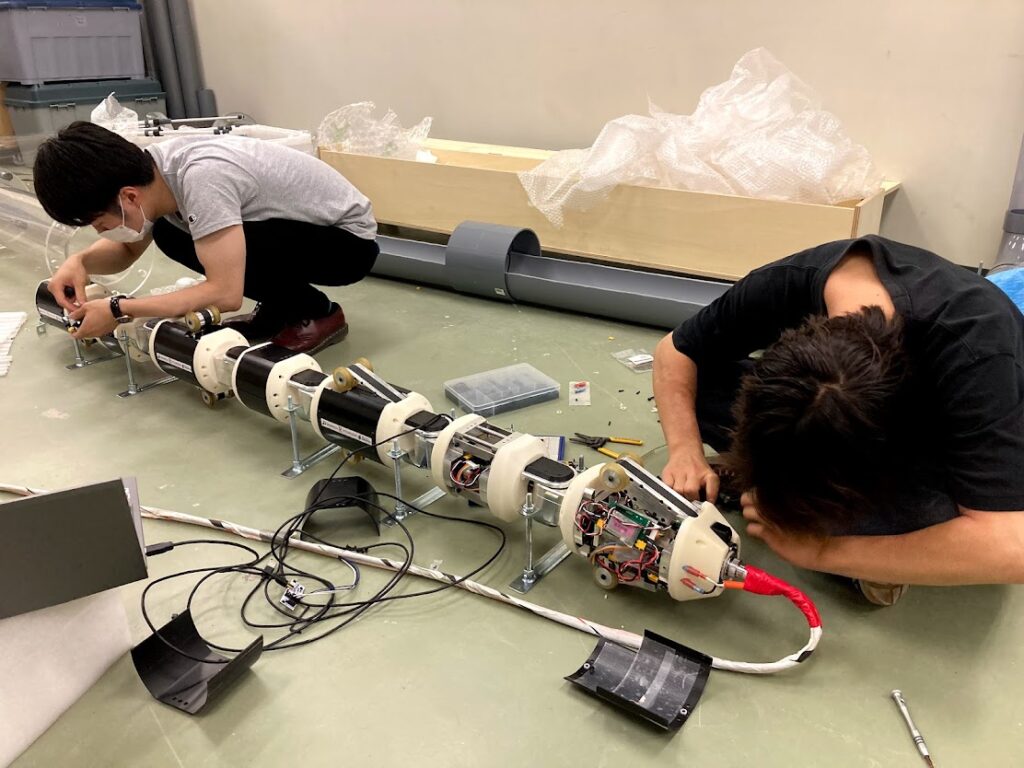
研究室によっては,市販のロボットや装置を買ってきて,それだけで研究することがあるかもしれません.しかし,当研究室では,市販の商品を使いこなすためのユーザー教育ではなく,ゼロからそのモノ自体を作り出せるデベロッパー教育を重視しています.
効率よく研究開発を進めるために,既に完成された回路基板やモータを買ってきて,ロボットに組み込んで使うことももちろんありますが,デバイスチップを買って,基板自体をゼロから起こすこともよくあります.モータについてもフレームレスのステータやロータ(永久磁石)を買って自作することがあります.最近では,3Dプリンタが一般的になったので,もちろんABSやPLAなどで造形試作することもありますが,高精度かつ滑らかな表面荒さを実現できる金属の切削加工も非常に大事にしていて,旋盤やフライス盤,NC加工機などで古典的に部品を自作することをとても重視しています.
本研究室のメンバーには日々挑戦することを要求しています.それは何もとんでもなく現実離れしたことや危険を伴うようなリスキーなことに挑めと言っているわけではありません.自分の人生の中で試したことのない経験をするという意味です.小さなことでも構わないし,誰かが既に経験したことであったとしても,自分の生きてきた歴史の中で初めてのことであれば,それは挑戦と言えると考えています.
一番良くないのはじっとして何も動かないことです.休みながらで良いので,とにかく歩き続けることが重要です.
本研究室では可能な限り,以下に挑戦することを推奨しています.
- 国内の学会や海外の国際会議(英語)で発表すること
- 日本の学術誌や英語の国際ジャーナル(英語)に論文投稿すること
- 展示会に出展し,ロボットのデモンストレーション(実演)を行うこと
- 民間企業や学外の研究機関と共同研究すること
- 海外の研究機関に短期留学して研究活動を行うこと
自然科学の原理原則究明に勤しむことはとても重要です.一方,工学は純粋な科学と異なり,基礎研究の成果を社会に還元すること(理論の実践)が大きな目的の一つでもあります.いくら素晴らしい理論を構築しても,それが世の中に上手く利用されなければ工学としての価値を見出すことは難しくなります(※もちろん理論を疎かにして良いという意味ではありません).
しかし,社会還元や理論の実践と言葉で言うのは易しで実際にやってみると途轍もなく行うは難しであることがわかります.モノづくりの業界でセンミツ(千のアイデアがあっても実るのは三つ程度という意味)という言葉がよく言われますが,ロボット工学分野にもこのことは当てはまります.実際には,万ミツや億ミツと呼ぶべきかもしれません.そんなに上手くいくなら日本の産業は今ごろぶっちぎりでトップを走っていることでしょう.
そのため,「三現主義」,すなわち「現場・現物・現実」を常に意識しながら研究活動に取り組むことを重要視しています.皆さんには,全てがコンピュータの中で完結するものだけを扱うのではなく,必ず質量と形がある現物を具現化し,現実に起こっている現象に基づいて考察することを要求しています.研究室の環境だけで実験するのではなく,実環境(現場)で試験を行うことも非常に重要視しています.実地試験の準備をしたり,ロボットを屋外へ運んだり,とても骨の折れる作業ですが,そこから得られる知見には非常に大きな価値があります.


また,「巧遅拙速」,すなわち「巧遅は拙速に如かず」も重要視しています.時間をかけてあれこれ頭の中で思考を巡らせ,考え込むことも大事ですが,機械やロボットのように複数の要素が複雑に統合された現物を扱う場合,難しいことは考えずに,とにかく初めに短時間で現物を作ってしまって,そこから現象を理解することも研究開発を進める上でとても重要だと考えています.トライ&エラー(トライアル&エラー)やアジャイル研究開発というキーワードもこれに関連します.
日本はサプライチェインが成熟していて,様々な工業製品を簡単に入手できる環境が整っています.また,最近では三次元プリンタに代表されるAM (Additive Manufacturing) の技術も進歩しています.ラピッドプロトタイピングを実行するにはとても恵まれた環境にあると言えます.

研究活動を続けていると,たくさんの発見があってとても面白く,感動することがあります.しかし,肉体的にも精神的にも辛いことが少なくありません.不測の事態も日常茶飯事です.そもそも研究開発は世の中で誰もやっていないことに取り組むことなので当たり前のことかもしれません.
研究開発は,「答えが既に決まっていて,そこに辿り着くための最短経路を見つける」という活動では全くありません.そもそも解が複数あって1つに定まらなかったり,解自体が存在するかどうかすらも疑わしいケースが少なくありません.そしてそれは研究開発に限らず,人生においても同じだと考えています.本研究室では,ネガティブ・ケイパビリティ (Negative Capability)も重要視しています.
答えのない問いに何度もぶち当たり,その都度自分の頭で考えて妥協点や収束点を見つけ出し,決断や行動をしなければなりません.時間がかかって大変ですが,学部の卒業研究や大学院での研究はそんなことの繰り返しです.でも,そういうことに向き合い続けていれば自ずと気づいた頃には一人の人間として成長した姿があるはずです.皆さんが悩み抜いた結果であれば,その決断や行動を応援します.一緒に頑張りましょう!
研究設備
基本的に学生1人につき,机とコンピュータを1台ずつ用意します.CADで設計したものを試作する際には,研究室内の加工機の他に学内の工作センターやAIOL(All in One Lab)を利用します.より高度な加工(精密加工・板金など)や表面処理(アルマイトなどのメッキ)が必要な場合には学外の加工業者に依頼することもあります.



