



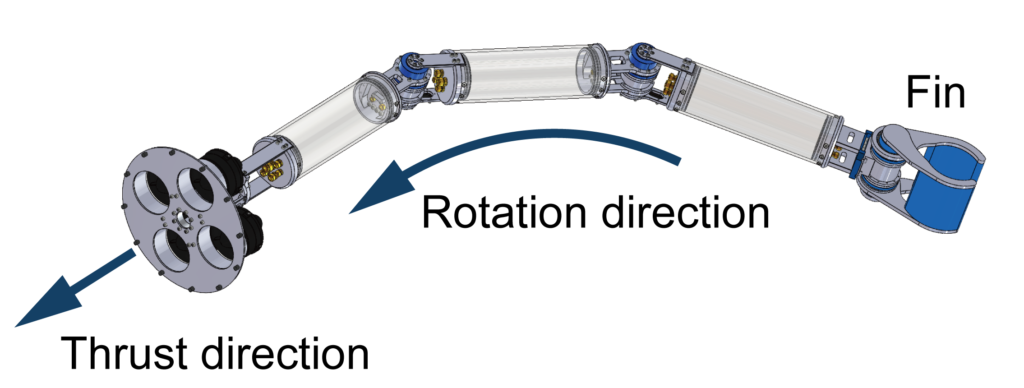
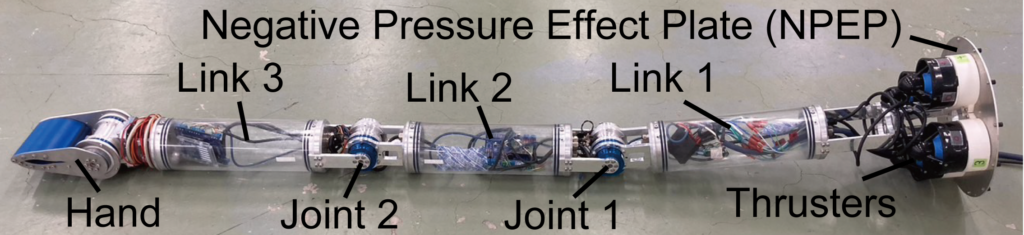
本研究では,アームとスラスタを組み合わせた水中移動作業ロボットアームの開発を進めています.その最大の特徴は,スラスタを噴射による遊泳だけでなく吸い込みによる壁面吸着にも利用する点です.遊泳時には,アームやハンドを鰭のように動かしますが,壁に貼り付いた後は,アームをマニピュレータとして利用します.基部に備えた負圧効果板と呼ばれる吸着力を高める構造により,板と壁面の間の圧力を下げて押し付け効果を最大限活かす仕組みを備えています.
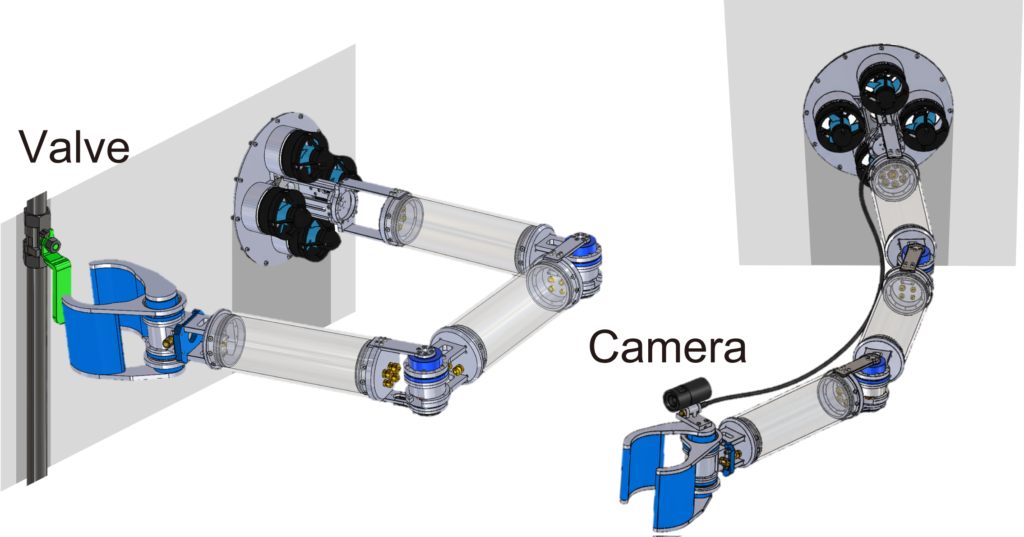
現段階では,壁面吸着中にアームを動かした際,その手先軌道によって変化する必要吸着力に着目し,吸着維持と剥離の境界を力学に基づく理論と実機実験により検証するところまで到達しました.
将来的には,プールなどの大型の液体貯蔵施設の壁や船舶の底などに貼り付きながら作業可能なロボットの実現を目指しています.
※本成果は,科学研究費助成事業(基盤研究(B))「トルクセンサレス・シーリングレス水陸両用柔軟アクチュエータの基礎研究」22H01456の支援を受けました.また,龍谷大学坂上憲光研究室との共同研究の結果生まれた成果です.
関連文献
- Shota Hiromoto, Atsushi Kakogawa, and Norimitsu Sakagami, An Articulated-arm Underwater Mobile and Manipulation Robot with Thrusters for Both Suction and Propulsion “Lamprey-1” -Calculation of Adhesive Force for Negative Pressure Effect Plate Required During Wall Suction Work and Its Verification Experiments-, Proc. the IEEE/SICE Int. Symp. System Integration (SII 2026), 2026
- Norimitsu Sakagami, Makoto Iwasaki, Masatoshi Fukami, Yuki Tanaka, Aoi Koshioka, and Atsushi Kakogawa, Numerical Evaluation of a Mobile Underwater Manipulator with a Structure-Wall Suction Mechanism, Journal of Artificial Life and Robotics, Vol. 30, pp. 812-819, 2025, https://doi.org/10.1007/s10015-025-01073-7
- 廣本翔太,加古川篤,坂上憲光,吸着式単腕型水中移動作業ロボット“Lampray-1” の開発 ―基本設計と中性浮力の検証―,日本機械学会ロボティクス・メカトロニクス講演会,2024