



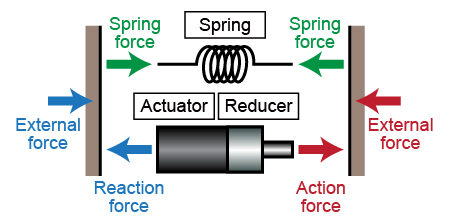
ロボット工学の歴史において,ロボットとそのアクチュエータのエネルギー消費を削減するために弾性体の利用がしばしば注目されてきました.その代表例がこちらでも紹介した直列弾性アクチュエータ(Series Elastic Actuator,通称SEA)です。一方,並列弾性アクチュエータ(Parallel Elastic Actuator,通称PEA)もよく採用されている方法です.SEAもPEAもどちらもモータと弾性体で構成されることには変わりないのですが,その取り付け方法が異なります.PEAでは,モータの作用と反作用が加わる場所に弾性体の端点が固定され,モータの内力と弾性体の復元力が干渉し合うように配置されます.このようなモータと弾性体の並列配置は「重力補償機構」でよく見られる方法です.しかし,重力補償機構の多くは静的な力(重力)を弾性体で補うものです.PEAのもう一つの利用方法として「運動の高効率化」があります.
一般的なPEAでは,金属のコイルばねがよく用いられます.しかし,コイルばねが伸縮するスペースを確保するために関節構造が複雑化・大型化する傾向にありました.そこで本研究では,1枚の金属薄板ばねのみを用いた板ばね式並列弾性アクチュエータ(Plate-Springed PEA,通称PSPEA)を提案しています.
コイルばねの弾性値はカタログなどに明記されています.しかし,板ばねの場合,金属の種類や縦横の大きさ,板厚のみが明記されているだけで,具体的な弾性値はわかりません.これは板ばねをどこで固定するかによって弾性値が変化するためです.そもそも板ばねをばねとして販売しているケースは少ないかもしれません.そこで,本研究では離散モデルを使った板ばねの剛性モデルをあらたに構築しました.ばねに力を加えると,一般的に弾性エネルギが最小になるような形状に落ち着きます.ばねに限らず,これは自然界でよく知れた現象です.この仕組みを利用してPEAのモータを駆動したときのばねの形状を求め,そこから剛性を導出することができます.
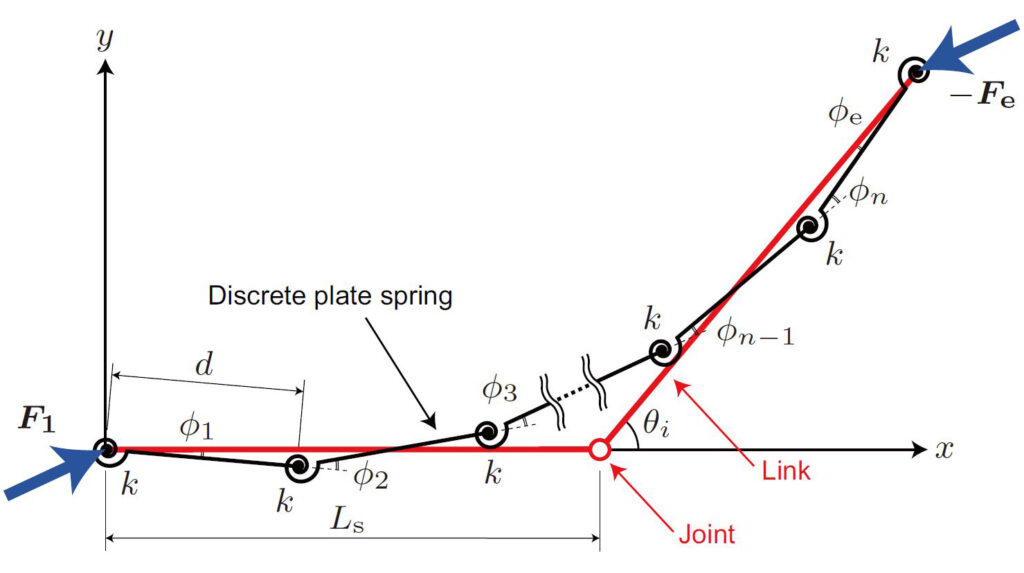
本研究では,Rigid Body Spring Model法(RBSM法)という手法によって任意の関節角度に対するばねの形状を導出し,その形状からばねの固定端に加わる外力を導出しました.外力と関節角度がわかれば,剛性(外力トルク/関節角度)が求められます.これにより,PEAのばねの剛性が関節角度に対してほとんど線形になることがわかりました.剛性がわかれば,PEA式ロボットの設計が容易になります.
※本成果は,立命館大学生物知能機械学研究室やウォータールー大学Mechanical Systems & Control Laboratoryとの共同研究の結果,生まれたものです.また,科学研究費助成事業(若手研究)「板バネとDDモータによる周期運動のための高効率小型並列弾性アクチュエータの研究」19K14949の支援を受けました.
関連文献
- Atsushi Kakogawa, Taihei Kawabata, and Shugen Ma, Plate-springed Parallel Elastic Actuator for Efficient Snake Robot Movement, IEEE/ASME Transactions on Mechatronics, Vol. 26, Iss. 6, pp. 3051-3063, 2021
- Atsushi Kakogawa, Taihei Kawabata, and Shugen Ma, Plate Springed Parallel Elastic Actuators for Efficient Movement of a Planar Snake Robot, Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2019), pp. 235-240, 2019
- 加古川篤,川端泰平,馬書根,並列弾性アクチュエータを用いたヘビ型ロボットの低速運動時におけるエネルギー消費抑制,システム制御情報学会論文誌,32巻,6号,pp. 227-233, 2019
- 加古川篤,馬書根,並列弾性アクチュエータを用いた高効率2次元ヘビ型ロボットの剛性設計,第62回システム制御情報学会研究発表講演会 (SCI’18),2018
- Atsushi Kakogawa, Soo Jeon, and Shugen Ma, Stiffness Design of a Resonance-based Planar Snake Robot with Parallel Elastic Actuators, IEEE Robotics and Automation Letters (RA-L), Vol. 3, Iss. 2, pp. 1284-1291, 2018
本研究の参考となった先行研究
- S. Hirose, Biologically Inspired Robots, London, U.K.: Oxford University Press, 1993
- D. W. Robinson, J. E. Pratt, D. J. Paluska and G. A. Pratt, Series elastic actuator development for a biomimetic walking robot, Proc. IEEE/ASME Int. Conf. Adv. Intell. Mechatron., pp. 561-568, Sep. 1999
- J. Hurst and A. Rizzi, Series compliance for an efficient running gait, IEEE Robot. Autom. Mag., vol. 15, no. 3, pp. 42-51, Sep. 2008
- M. Uemura, K. Kanaoka, and S. Kawamura, A new control method utilizing stiffness adjustment of mechanical elastic elements for serial link systems, Proc. IEEE Int. Conf. Robot. Autom., pp. 1437–1442, 2007
- M. Uemura and S. Kawamura, Resonance-based motion control method for multi-joint robot through combining stiffness adaptation and iterative learning control, Proc. IEEE Int. Conf. Robot. Autom., pp. 1543-1548, 2009
- M. Uemura,, H. Goya and S. Kawamura, Motion control with stiffness adaptation for torque minimization in multijoint robots, IEEE Trans. Robot., vol. 30, no. 2, pp. 352-364, 2014
- K. Ono, T. Furuichi and and R. Takahashi, Self-excited walking of a biped mechanism with feet, Int., J. Robot. Res., vol. 20, no. 12, pp. 953-966, 2001
- J. Ute and K. Ono, Fast and efficient locomotion of a snake robot based on self-excitation principle, Proc. 7th Int. Workshop Adv. Motion Control, pp. 532–539, 2002
- D. Efimov, A. Fradkov and and T. Iwasaki, On finite time resonance entrainment in multi-DOF systems, Proc. Amer. Control Conf., pp. 1035-1039, 2012