



こちらで紹介したロボット「AIRo」では,オペレータは2次元のカメラ映像のみからロボットを操作する必要があり,手元の手動コントローラのみによって球状車輪の転がる向きや角度を適切に調整しなければなりませんでした.これには熟練技術が必要になり,個人差はありますが操作に慣れるまで時間がかかります.そこで本研究では,ロボットが曲管に差し掛かった際にカメラ映像内に現れる三日月状の影画像を利用してロボットの転がるべき方向を球状車輪の回転に反映させる方法を提案しています.
原理を以下に説明します.カメラに対して照明の位置を曲管の経路に近くなるように配置すると影が現れ,逆に照明の位置を曲管の経路から遠くなるように配置すると影は消えます.影が現れている状態からロボットの配管軸まわりの姿勢を回転させると,三日月状の影はカメラ映像内で円を描きながら徐々に小さくなり,やがて消えます.影が現れているときに影が小さくなる方向へ球状車輪を回転させ,影が消えたときに駆動輪を回転させて前進する,という指令をロボットに与えれば,点検作業者はロボットを前進後退あるいは停止させるための簡単な指令を送るだけで済み,曲管の向きに合わせて球状車輪を操作する必要が無くなります.
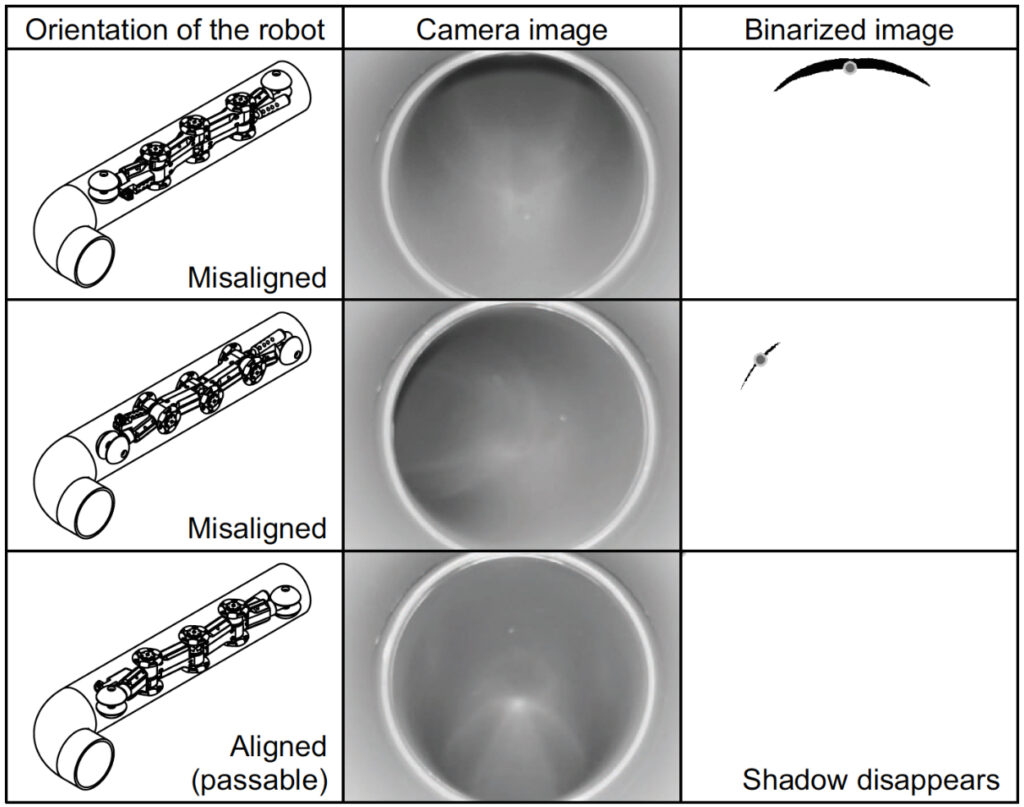
ここでは,ロボットが曲管の経路方向に対してある特定の姿勢でしか通過できないという「曲管走破の姿勢依存性」と曲管の経路方向に対してある特定の姿勢でしか三日月状の影が消えないという「影出現の姿勢依存性」の2つの点に着目し,これらを重ね合わせることによりロボットの自動姿勢調整を可能にしました.また,カメラと照明をずらして配置しただけの非常にシンプルな構成で小型の自動姿勢調整システムを実現したことに加え,カメラと照明を検査だけでなくロボットの自動姿勢調整にも活用することで機能を最大限に活かしています(一石二鳥).配管内は空間的制約が大きく,複数のセンサをロボットに搭載することができません.暗く狭い配管内を確認するためにカメラと照明が必要になりますが,これらの他に全くセンサなどの部品を追加することなく自動姿勢調整を達成しています.
ロボットが曲管に差し掛かると,上記で述べたように,自動姿勢調整の機能が動作し始めます.しかし,直管内でもカメラ映像の中央部に影が現れるため,同じシステムを動作させると直管内で回転し始める可能性があります.そこで,カメラ映像から曲管内の影画像をのみを抽出するために2値化処理にも独自の工夫を凝らしています.直管内ではカメラ映像内の外側から中央に向かって徐々に暗くなるのに対し,曲管内では前方の壁が照明の光を反射するため,カメラ映像内の明るい領域が多く,影の部分のみが局所的に暗く映ります.
本研究では,この直管と曲管の明るさの分布の違いから輝度値対画素数の分散値の大小に着目し,直管と曲管を事前に自動判別させている.このような分散値の現れ方の傾向を予め計測することによって鋼管や樹脂管などの反射率の
異なる配管でも利用可能です.現在までに7個の曲管と垂直部を含む全長7.5mの不透明な模擬配管で実験を行った結果,人間が操作しなくとも完走できることを確認しています.
※本成果は,立命館大学生物知能機械学研究室との共同研究の結果,生まれたものです.また,科学技術振興機構(JST)・大学発新産業創出プログラム(START)技術シーズ選抜育成プロジェクト〔ロボティクス分野〕「視覚情報に基づく配管内検査ロボットの自律制御とマップ作成」の支援を受けました
関連文献
- Atsushi Kakogawa, Yuki Komurasaki, and Shugen Ma, Shadow-based Operation Assistant for a Pipeline-inspection Robot using a Variance Value of the Image Histogram, Journal of Robotics and Mechatronics, Vol. 31, Iss. 6, pp. 772-780, 2019
- Atsushi Kakogawa, Yuki Komurasaki, Shugen Ma, Anisotropic Shadow-based Operation Assistant for a Pipeline-inspection Robot using a Single Illuminator and Camera, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017), pp. 1305-1310, 2017
- 小紫由基,加古川篤,馬書根,影画像情報に基づく配管検査ロボットのエルボー管内自動走行システム,日本機械学会ロボティクス・メカトロニクス講演会 2016,2P2-14a5,2016
本研究の参考となった先行研究
- J. Lee, S. Roh, D. W. Kim, H. Moon, and H. R. Choi, In-pipe Robot Navigation Based on the Landmark Recognition System Using Shadow Images, in Proc. of the IEEE Int. Conf. Robotics and Automation, pp. 1857-1862, 2009
- D. H. Lee, H. Moon, and H. R. Choi, Landmark Detection Methods for In-pipe Robot Traveling in Urban Gas Pipelines, Robotica, Vol. 34, Iss. 3, pp. 601-618, 2016