



従来のロボットの多くは高減速比ギアや金属製の筐体部品など,高剛性の要素のみで構成されているため,外部環境との接触に対して柔軟な反応が困難でした.これを解決する方法として減速機とロボットの関節出力軸の間に弾性体を備えた直列弾性アクチュエータ(Series Elastic Actuator,通称SEA)と呼ばれる機構が提案されています.この直列弾性アクチュエータは,弾性体の入力側と出力側に2つの位置センサ(あるいは角度センサ)を内蔵しており,これらの値の差分から弾性変形量を計測できます.この弾性変形量に既知の弾性係数(ばね定数)をかけることにより,関節に加わる外力を推定できます.この原理は直動関節と回転関節の両方に適用可能ですが,本研究では回転関節に着目しています.
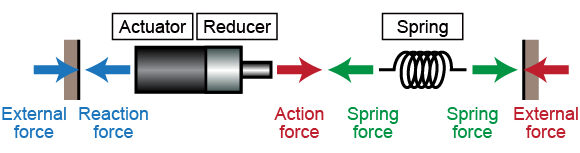
しかし,一般的にこれらに用いられている弾性体は金属製のばねであり,回転に対する正転逆転両方向の弾性特性を実現するために特殊な形状になりやすく,切削加工や焼入れに手間を要していました.また,ばね用鋼の弾性領域内での変形量は小さいため,大変形を実現するためには全体が大型化する傾向にありました.そこで近年,正転逆転両方向に対称な特性を持った高分子材料製のゴムばねをせん断方向に支持した直列弾性アクチュエータを構成する事例が報告され始めています.高分子材料製のゴムばねは金属ばねに比べると変形量や粘性が大きいため,トルクセンサや直列弾性アクチュエータなどへの応用だけでなく,振動抑制の効果も期待できます.また,高分子材料の大きさを変えることにより,弾性係数を簡単に変更できるため,設計の自由度も上がります.
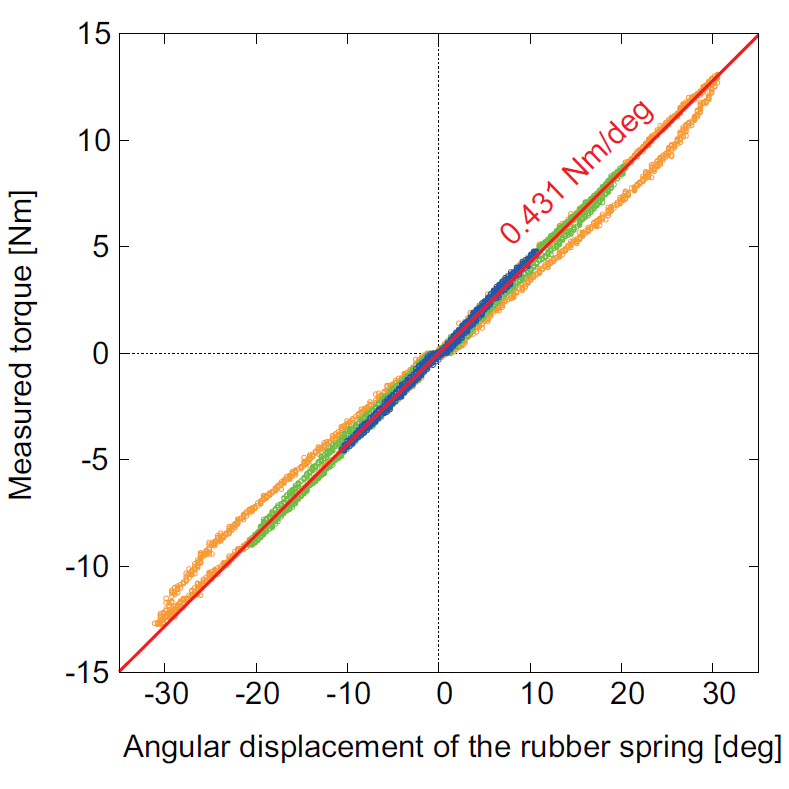
本研究では,高分子材料の中でも粘性の小さなポリウレタンに着目し,ロボットの関節に利用することを想定してせん断方向に支持したときの回転弾性と回転粘性を計測しました.計測から,直径Φ36mm x 厚み10mmのポリウレタンの場合,±5 Nm程度までの範囲内であれば高い線形性を示し,トルク推定しやすいことが明らかになりました.
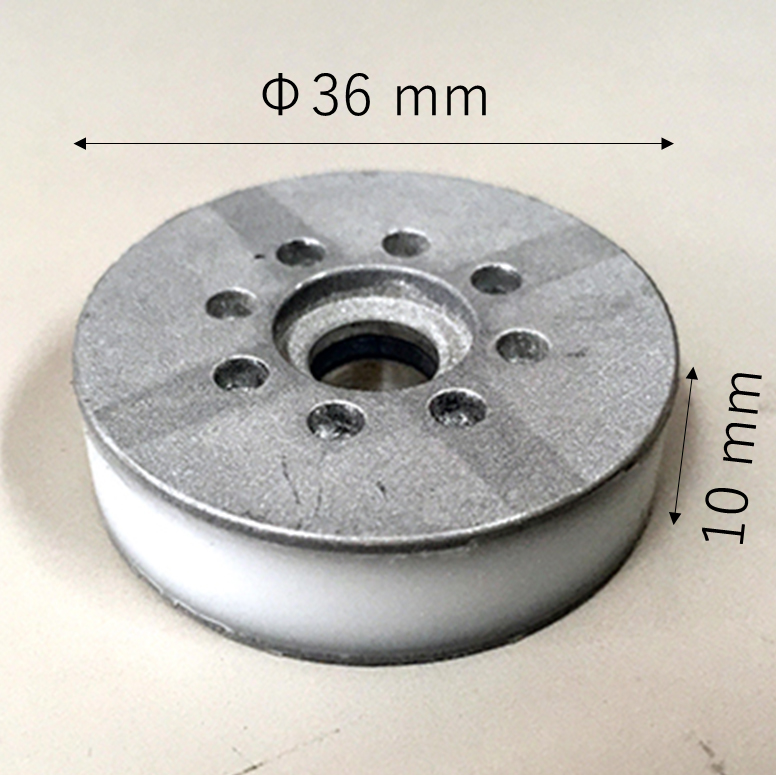
また,一般的なポリウレタンを金属部品などに固定すると,力が加わったときに接着面の剥離が起こりやすく,すぐに破断してしまう問題がありました.これを解決するため,酸エッジングによって金属面を意図的に腐食させてからポリウレタンを固定するPOLYMETAC(三井化学株式会社)を使って高強度の高分子材料製直列弾性アクチュエータを製作しました.一般的なポリウレタンが約10 Nmで破断したのに対し,本研究のポリウレタンは同サイズで約30 Nmまで耐久性が向上しました.
※本成果は,立命館大学生物知能機械学研究室との共同研究の結果,生まれたものです.また,科学研究費助成事業(若手研究(B))「狭隘環境のための小型差動弾性アクチュエータの研究開発」17K14632の支援を受けました.
関連文献
- Atsushi Kakogawa, Kenya Murata, and Shugen Ma, Automatic T-branch Travel of an Articulated Wheeled In-pipe Inspection Robot Using Joint Angle Response to Environmental Changes, IEEE Transactions on Industrial Electronics, Vo. 70, Iss. 7, pp. 7041-7050, 2023
- Atsushi Kakogawa, Kenya Murata, Shugen Ma, Vertical Bend and T-branch Travels of an Articulated Wheeled In-pipe Inspection Robot by Combining Its Joint Angle and Torque Controls, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022), pp. 13254-13259, 2022
- 村田憲哉,加古川篤,馬書根,1自由度能動関節のみを用いた連結車輪型管内移動ロボットのT字管走行 ―第2 報:角度センサの配置による関節角度およびトルクの計測性能の比較―,日本機械学会ロボティクス・メカトロニクス講演会 2022,2P1-M09,2022
- Atsushi Kakogawa, Yutaro Kushitani, and Shugen Ma, Automatic T-branch Travel of a Multi-link In-pipe Inspection Robot based on Joint Torque Value, 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022
- Atsushi Kakogawa and Shugen Ma, A Multi-link In-pipe Inspection Robot Composed of Active and Passive Compliant Joints, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2020), pp. 6472-6478, 2020
- 櫛谷侑太郎,加古川篤,馬書根,1自由度能動関節のみを用いた連結車輪型管内移動ロボットのT字管走行,日本機械学会ロボティクス・メカトロニクス講演会 2020,2P1-L08,2020
- 小川恭平,加古川篤,馬書根,川村貞夫,ロボット用せん断支持型高分子弾性要素の機械特性,日本機械学会ロボティクス・メカトロニクス講演会 2020,2P1-L07,2020
- Atsushi Kakogawa and Shugen Ma, An In-pipe Inspection Module with an Omnidirectional Bent-pipe Self-adaptation Mechanism using a Joint Torque Control, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019), pp. 4347-4352, 2019
- Atsushi Kakogawa and Shugen Ma, A Differential Elastic Joint for Multi-Linked Pipeline Inspection Robots, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018), pp. 949-954, 2018
本研究の参考となった先行研究
- G.A. Pratt and M.M. Williamson, Series Elastic Actuators, Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots, pp. 399-406, 1995
- D. Rollinson, S. Ford, B. Brown, and H. Choset, Design and Modeling of a Series Elastic Element for Snake Robots, in Proc. the ASME Dynamic Systems and Control Conference, pp. 1-5, 2013
- D. Rollinson, Y. Bilgen, B. Brown, F. Enner, S. Ford, C. Layton, J. Rembisz, M. Schwerin, A. Willig, P. Velagapudi and H. Choset, Design and Architecture of a Series Elastic Snake Robot, in Proc. the IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 4630-4636, 2014