



日刊工業新聞に当研究室で開発する水中ヘビ型ロボットの紹介記事が掲載されました!本ロボットには防水シールを使わない水没型ギアード電動サーボモータが使用されています.
プロペラ推進(スラスタ)のような無限軌道推進機構を使った従来型水中ROV(Remotely Operated Vehicle)の場合,水草や水中に浮遊したゴミに絡まってしまう問題がありました.ヒレ推進の場合は,往復運動のみで推進するため,このような環境下でも間を縫うように進むことができます.ヒレ推進機構は主に魚型ロボットでもよく使用されますが,我々は多関節型(ヘビ型)として,遊泳だけでなく,身体そのものを水中マニピュレーションや水中ハンドリングにも使えないか?という研究を行っています.
このマニピュレーションやハンドリングの際には力制御が必要になることがありますが,水中仕様の力センサやトルクセンサは高額なので,そのようなセンサが不要になるように水没型ギアード電動サーボモータでロボットを構成し,センサレストルク制御技術を実装しました.今回はその一例として水中浮遊物をセンサレス把持力制御によってつかみ,回収するというデモンストレーションを行いました.

立命館大、水中ヘビ型ロボ開発 円柱状浮体に巻き付き回収
立命館大学の岩崎裕斗大学院生と加古川篤准教授は、水中ヘビ型ロボットを開発し、円柱状の浮体の把持回収に成功した。ヘビ型ロボが泳いで柱に巻き付く。ロボットごと対象を回収することもできるが、ロボが水中に留ま...
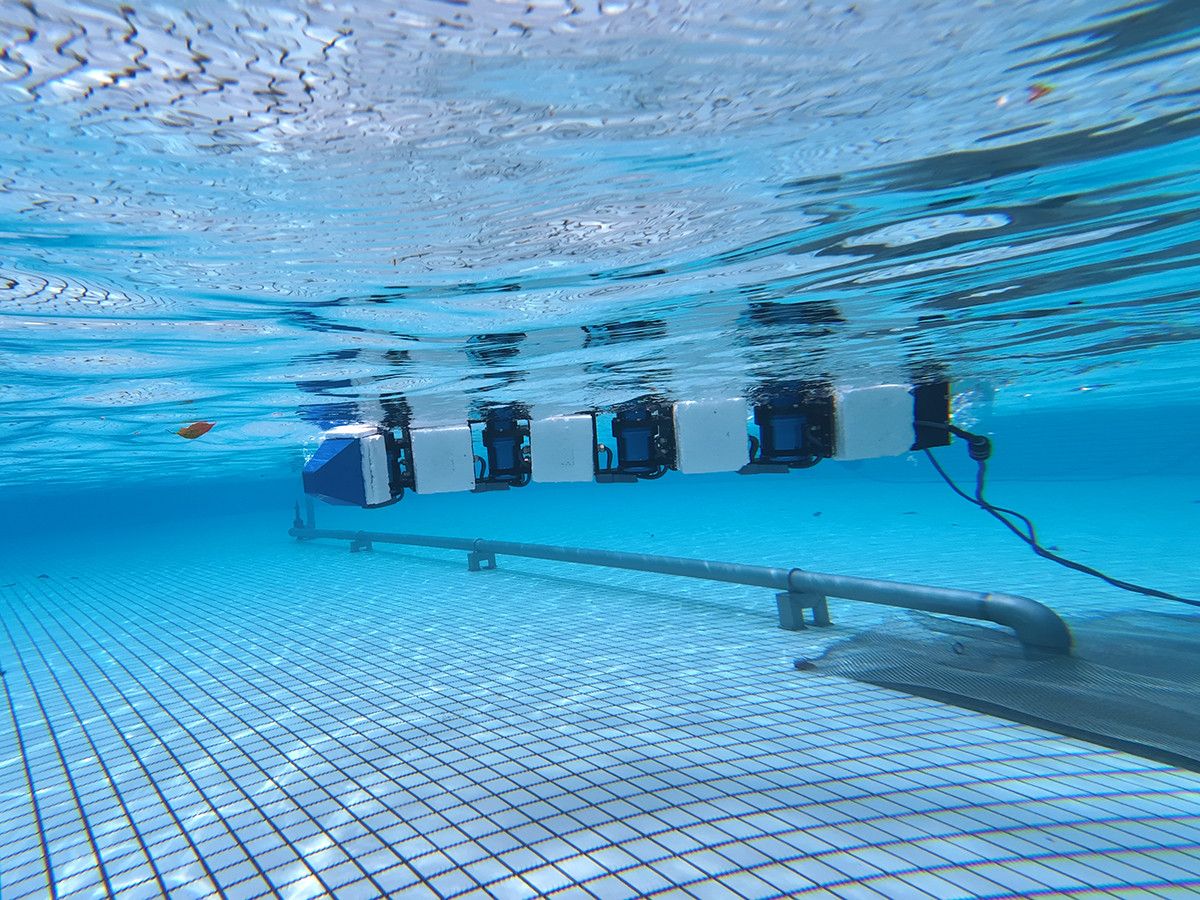
関節に防水シールを用いないヘビ型水中遊泳ロボット
水中ロボットの分野では,Remotely Operated Vehicles (ROV)やAutonomous Underwater Ve...